题目内容
根据指令[s,A](s≥0,0°<A<360°),机器人在平面上能完成下列动作:先原地逆时针旋转角度A,再朝其面对的方向沿直线行走距离s,现机器人在直角坐标系的坐标原点,且面对x轴正方向.
(1)若给机器人下了一个指令[3,90°],则机器人应移动到点 ;
(2)请你给机器人下一个指令 ,使其移动到点(6,-6).
(1)若给机器人下了一个指令[3,90°],则机器人应移动到点
(2)请你给机器人下一个指令
考点:坐标与图形变化-旋转
专题:
分析:(1)根据指令确定出所在的位置,然后解答即可;
(2)根据点(6,-6)在第四象限的角平分线上确定出A,再利用勾股定理列式求出点到坐标原点O的距离,然后解答即可.
(2)根据点(6,-6)在第四象限的角平分线上确定出A,再利用勾股定理列式求出点到坐标原点O的距离,然后解答即可.
解答:解:(1)A=90°时,机器人在y轴正半轴,
所以,指令[3,90°]表示机器人应移动到点(0,3);
(2)∵点(6,-6)在第四象限角平分线上,
∴A=315°,
=6
,
∴指令为[6
,315°].
故答案为:(0,3);[6
,315°].
所以,指令[3,90°]表示机器人应移动到点(0,3);
(2)∵点(6,-6)在第四象限角平分线上,
∴A=315°,
| 62+62 |
| 2 |
∴指令为[6
| 2 |
故答案为:(0,3);[6
| 2 |
点评:本题考查了坐标与图形变化-旋转,读懂题目信息,理解指令的两个数的实际意义是解题的关键.

练习册系列答案
 智能训练练测考系列答案
智能训练练测考系列答案
相关题目
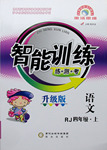
 甲、乙两车同时分别从A、B两地出发相向而行,甲车到达B地后立即返回A地,若两车离A地的距离S(千米)与所用时间t(分)的函数关系如图,则甲、乙两车在途中两次相遇的间隔时间为
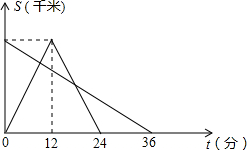
甲、乙两车同时分别从A、B两地出发相向而行,甲车到达B地后立即返回A地,若两车离A地的距离S(千米)与所用时间t(分)的函数关系如图,则甲、乙两车在途中两次相遇的间隔时间为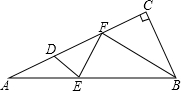 如图,在Rt△ABC中,∠CAB=30°,∠C=90°.AD=
如图,在Rt△ABC中,∠CAB=30°,∠C=90°.AD= 已知点A、B、C在⊙O上,如图,若∠BOC=50°,那么∠BAC=
已知点A、B、C在⊙O上,如图,若∠BOC=50°,那么∠BAC= 如图,?OABC中顶点A在x轴负半轴上,B、C在第二象限,对角线交于点D,若C、D两点在反比例函
如图,?OABC中顶点A在x轴负半轴上,B、C在第二象限,对角线交于点D,若C、D两点在反比例函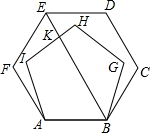 把边长相等的正五边形ABGHI和正六边形ABCDEF的AB边重合,按照如图的方式叠合在一起,连接EB,交HI于点K,则∠BKI的大小为( )
把边长相等的正五边形ABGHI和正六边形ABCDEF的AB边重合,按照如图的方式叠合在一起,连接EB,交HI于点K,则∠BKI的大小为( )| A、90° | B、84° |
| C、72° | D、88° |
若关于x的不等式组
在实数范围内有解,则a的取值范围为( )
|
| A、a>0 | B、a≥0 |
| C、a<0 | D、a≤0 |