网址:http://m.1010jiajiao.com/timu_id_547013[举报]
典型例题
 [例1] 解析:对系统进行整体分析,受力分析如图1―2:
[例1] 解析:对系统进行整体分析,受力分析如图1―2:
由平衡条件有:

由此解得

[例2] 解析: (1)设t1、t2为声源S发出两个信号的时刻, 为观察者接收到两个信号的时刻.则第一个信号经过
为观察者接收到两个信号的时刻.则第一个信号经过 时间被观察者A接收到,第二个信号经过(
时间被观察者A接收到,第二个信号经过( )时刻被观察者A接收到,且
)时刻被观察者A接收到,且

 |
|||
 |
|||
设声源发出第一个信号时,S、A两点间的距离为L,两个声信号从声源传播到观察者的过程中,它们的运动的距离关系如图所示,
可得
由以上各式解得
(2)设声源发出声波的振动周期为T,这样,由以上结论,观察者接收到的声波振动的周期T′, .
.
由此可得,观察者接收到的声波频率与声源发出声波频率间的关系为
 .
.
[例3] 解答:根据题意作图1―4.
对这两个天体而言,它们的运动方程分别为 ①
①
 ②
②
 以及
以及 ③
③
由以上三式解得 .
.
将r1和r2的表达式分别代①和②式,
可得 .
.

[例4] 解答:(1)A、B两球以相同的初速度v0,从同一点水平抛出,可以肯定它们沿同一轨道运动.
作细线刚被拉直时刻A、B球位置示意图1―5.
根据题意可知:


设A球运动时间为t,则B球运动时间为t-0.8,由于A、B球在竖直方向上均作自由落体运动,所以有 .
.
由此解得t =1s.
(2)细线刚被拉直时,
A、B球的水平位移分别为
[例5] 解答:(1)A球通过最低点时,作用于环形圆管的压力竖直向下,根据牛顿第三定律,A球受到竖直向上的支持力N1,由牛顿第二定律,有:
 ①
①
由题意知,A球通过最低点时,B球恰好通过最高点,而且该时刻A、B两球作用于圆管的合力为零;可见B球作用于圆管的压力肯定竖直向上,根据牛顿第三定律,圆管对B球的反作用力N2竖直向下;假设B球通过最高点时的速度为v,则B球在该时刻的运动方程为 ②
②
由题意N1=N2 ③
∴ ④
④
对B球运用机械能守恒定律 ⑤
⑤
解得 ⑥
⑥
⑥式代入④式可得: .
.
[例6] 解答:火箭上升到最高点的运动分为两个阶段:匀加速上升阶段和竖直上抛阶段.
地面上的摆钟对两个阶段的计时为

即总的读数(计时)为t =t1+t2=360(s)
放在火箭中的摆钟也分两个阶段计时.
第一阶段匀加速上升,a=8g,钟摆周期
其钟面指示时间
第二阶段竖直上抛,为匀减速直线运动,加速度竖直向下,a=g,完全失重,摆钟不“走”,计时 .可见放在火箭中的摆钟总计时为
.可见放在火箭中的摆钟总计时为 .
.
综上所述,火箭中的摆钟比地面上的摆钟读数少了 .
.
[例7] 解答:在情形(1)中,滑块相对于桌面以速度v0=0.1m/s向右做匀速运动,放手后,木板由静止开始向右做匀加速运动.
经时间t,木板的速度增大到v0=0.1m/s, .
.
在5s内滑块相对于桌面向右的位移大小为S1=v0t=0.5m.
而木板向右相对于桌面的位移为 .
.
可见,滑块在木板上向右只滑行了S1-S2=0.25m,即达到相对静止状态,随后,它们一起以共同速度v0向右做匀速直线运动.只要线足够长,桌上的柱子不阻挡它们运动,滑块就到不了木板的右端.
在情形(2)中,滑块与木板组成一个系统,放手后滑块相树于木板的速度仍为v0,滑块到达木板右端历时 .
.
[例8] 解答:以m表示球的质量,F表示两球相互作用的恒定斥力,l表示两球间的原始距离.A球作初速度为v0的匀减速运动,B球作初速度为零的匀加速运动.在两球间距由l先减小,到又恢复到l的过程中,A球的运动路程为l1,B球运动路程为l2,间距恢复到l时,A球速度为v1,B球速度为v2.
由动量守恒,有
由功能关系:A球 B球:
B球:
根据题意可知l1=l2,
由上三式可得
得v2=v0、v1=0 即两球交换速度.
当两球速度相同时,两球间距最小,设两球速度相等时的速度为v,
则
B球的速度由 增加到v0花时间t0,即
增加到v0花时间t0,即
得 .
.
解二:用牛顿第二定律和运动学公式.(略)
跟踪练习
1.C 提示:利用平衡条件.
2.(1)重物先向下做加速运动,后做减速运动,当重物速度为零时,下降的距离最大,设下降的最大距离为h,
由机械能守恒定律得 解得
解得 .
.
(2)系统处于平衡状态时,两小环的可能位置为
 a.两小环同时位于大圆环的底端
a.两小环同时位于大圆环的底端
b.两小环同时位于大圆环的顶端
c.两小环一个位于大圆环的顶端,另一个位于大圆环的底端
d.除上述三种情况外,根据对称性可知,系统如能平衡,则小圆环的位置一定关于大圆环竖直对称轴对称.设平衡时,两小圆环在大圆环竖直对称轴两侧 角的位置上(如图).
角的位置上(如图).
对于重物m,受绳的拉力T与重力mg作用,有T=mg.对于小圆环,受到三个力的作用,水平绳的拉力T,竖直绳的拉力T,大圆环的支持力N.两绳的拉力沿大圆环切向的分力大小相等,方向相反 .
.
得 .
.
3.设测速仪扫描速度为v′,因P1、P2在标尺上对应间隔为30小格,所以 格/s.
格/s.
测速仪发出超声波信号P1到接收P1的反射信号n1.从图B上可以看出,测速仪扫描12小格,所以测速仪从发出信号P1到接收其反射信号n1所经历时间 .
.
汽车接收到P1信号时与测速仪相距 .
.
同理,测速仪从发出信号P2到接收到其反射信号n2,测速仪扫描9小格,故所经历时间 .汽车在接收到P2信号时与测速仪相距
.汽车在接收到P2信号时与测速仪相距 .
.
所以,汽车在接收到P1、P2两个信号的时间内前进的距离△S=S1-S2=17m.
从图B可以看出,n1与P2之间有18小格,所以,测速仪从接收反射信号n1到超声信号P2的时间间隔 .
.
所以汽车接收P1、P2两个信号之间的时间间隔为 .
.
∴汽车速度 m/s.
m/s.
4.从B发出第一个超声波开始计时,经 被C车接收.故C车第一次接收超声波时与B距离
被C车接收.故C车第一次接收超声波时与B距离 .
.
第二个超声波从发出至接收,经T+△T时间,C车第二车接收超声波时距B为 ,C车从接收第一个超声波到接收第二个超声波内前进S2-S1,接收第一个超声波时刻
,C车从接收第一个超声波到接收第二个超声波内前进S2-S1,接收第一个超声波时刻 ,接收第二个超声波时刻为
,接收第二个超声波时刻为 .
.
所以接收第一和第二个超声波的时间间距为 .
.
故车速 .车向右运动.
.车向右运动.
5.ACD
6.(1)根据动能定理,可求出卫星由近地点到远地点运动过程中,地球引力对卫星的功为 .
.
(2)由牛顿第二定律知 ∴
∴
 7.(1)建立如图所示坐标系,将v0与g进行正交分解.
7.(1)建立如图所示坐标系,将v0与g进行正交分解.

在x方向,小球以 为初速度作匀加速运动.
为初速度作匀加速运动.
在y方向,小球以 为初速度,作类竖直上抛运动.
为初速度,作类竖直上抛运动.
当y方向的速度为零时,小球离斜面最远,由运动学公式 .
.
小球经时间t上升到最大高度,由 得
得 .
.
(2)

8.(1)设滑雪者质量为m,斜面与水平面夹角为 ,滑雪者滑行过程中克服摩擦力做功
,滑雪者滑行过程中克服摩擦力做功 ①
①
由动能定理 ②
②
离开B点时的速度 ③
③
(2)设滑雪者离开B点后落在台阶上
可解得 ④
此时必须满足
④
此时必须满足 ⑤
⑤
当 时,滑雪者直接落到地面上,
时,滑雪者直接落到地面上, ,
,
可解得 .
.
9.AC
10.摆球先后以正方形的顶点为圆心,半径分别为R1=4a,R2=3a,R3=2a,R4=a为半径各作四分之一圆周的圆运动.
当摆球从P点开始,沿半径R1=4a运动到最低点时的速度v1,
根据动量定理 ①
①
当摆球开始以v1绕B点以半径R2=3a作圆周运动时,摆线拉力最大,为Tmax=7mg,这时摆球的运动方程为 ②
②
由此求得v0的最大许可值为 .
.
当摆球绕C点以半径R3=2a运动到最高点时,为确保沿圆周运动,
到达最高点时的速度 (重力作向心力)
(重力作向心力)
由动能定理
∴
11.B
12.由题意知,周期为 .波速
.波速 .
.
P、Q两点距离相差 次全振动所需时间即
次全振动所需时间即
∴ .
.
13.ABC 开始时小车上的物体受弹簧水平向右的拉力为6N,水平向左的静摩擦力也为6N,合力为零.沿水平向右方向对小车施加以作用力,小车向右做加速运动时,车上的物体沿水平向右方向上的合力(F=ma)逐渐增大到8N后恒定.在此过程中向左的静摩擦力先减小,改变方向后逐渐增大到(向右的)2N而保持恒定;弹簧的拉力(大小、方向)始终没有变,物体与小车保持相对静止,小车上的物体不受摩擦力作用时,向右的加速度由弹簧的拉力提供: .
.
14.(1)设物体与板的位移分别为S物、S板,则由题意有 ①
①
 ② 解得:
② 解得: .
.
(2)由 .
.

得 ,故板与桌面之间的动摩擦因数
,故板与桌面之间的动摩擦因数 .
.
15.在0~10s内,物体的加速度 (正向)
(正向)
在10~14s内,物体的加速度 (反向)
(反向)
由牛顿第二定律 ①
①
 ②
②
由此解得F=8.4N  =0.34
=0.34
16.(1)依题意得 =0,设小滑块在水平面上运动的加速度大小为a,
=0,设小滑块在水平面上运动的加速度大小为a,
由牛顿第二定律, ,由运动学公式
,由运动学公式 ,解得
,解得 .
.
(2)滑块在水平面上运动时间为t1,由 .
.
在斜面上运动的时间
(3)若滑块在A点速度为v1=5m/s,则运动到B点的速度 .
.
即运动到B点后,小滑块将做平抛运动.
假设小滑块不会落到斜面上,则经过 落到水平面上,
落到水平面上,
则水平位移 .
.
所以假设正确,即小滑块从A点运动到地面所需时间为 .
.
专题二 动量与机械能
典型例题
[例1] D
解析:本题辨析一对平衡力和一对作用力和反作用力的功、冲量.因为,一对平衡力大小相等、方向相反,作用在同一物体上,所以,同一段时间内,它们的冲量大小相等、方向相反,故不是相同的冲量,则①错误.如果在同一段时间内,一对平衡力做功,要么均为零(静止),要么大小相等符号相反(正功与负功),故②正确.至于一对作用力与反作用力,虽然两者大小相等,方向相反,但分别作用在两个不同物体上(对方物体),所以,即使在同样时间内,力的作用点的位移不是一定相等的(子弹穿木块中的一对摩擦力),则做功大小不一定相等.而且作功的正负号也不一定相反(点电荷间相互作用力、磁体间相互作用力的做功,都是同时做正功,或同时做负功.)因此③错误,④正确.综上所述,选项D正确.
【例2】 解析:(1)飞机达到最大速度时牵引力F与其所受阻力f 大小相等,
由P=Fv得
(2)航空母舰上飞机跑道的最小长度为s,由动能定理得
 将
将 代入上式得
代入上式得 或
或
【例3】 解析:解法1(程序法):
选物体为研究对象,在t1时间内其受力情况如图①所示,选F的方向为正方向,根据牛顿第二定律,物体运动的加速度为 .
.
 |
撤去F时物体的速度为v1=a1t1=2×6m/s=12m/s
撤去F后,物体做匀减速运动,其受力情况如图②所示,根据牛顿第二定律,其运动的加速度为 .
.
物体开始碰撞时的速度为v2=v1+a2t2=[12+(-2)×2]m/s=8m/s.
再研究物体碰撞的过程,设竖直墙对物体的平均作用力为 ,其方向水平向左.若选水平向左为正方向,根据动量定理有
,其方向水平向左.若选水平向左为正方向,根据动量定理有 .
.
解得 .
.
解法2(全程考虑):取从物体开始运动到碰撞后反向弹回的全过程应用动量定理,并取F的方向为正方向,则
所以
点评:比较上述两种方法看出,当物体所受各力的作用时间不相同且间断作用时,应用动量定理解题对全程列式较简单,这时定理中的合外力的冲量可理解为整个运动过程中各力冲量的矢量和.此题应用牛顿第二定律和运动学公式较繁琐.
另外有些变力作用或曲线运动的题目用牛顿定律难以解决,应用动量定理解决可化难为易.
【例4】 解析:该题用守恒观点和转化观点分别解答如下:
解法一:(守恒观点)选小球为研究对象,设小球沿半径为R的轨道做匀速圆周运动的线速度为v0,根据牛顿第二定律有 ①
①
当剪断两物体之间的轻线后,轻线对小球的拉力减小,不足以维持小球在半径为R的轨道上继续做匀速圆周运动,于是小球沿切线方向逐渐偏离原来的轨道,同时轻线下端的物体m1逐渐上升,且小球的线速度逐渐减小.假设物体m1上升高度为h,小球的线速度减为v时,小球在半径为(R+h)的轨道上再次做匀速圆周运动,根据牛顿第二定律有 ②
②
再选小球M、物体m1与地球组所的系统为研究对象,研究两物体间的轻线剪断后物体m1上升的过程,由于只有重力做功,所以系统的机械能守恒.选小球做匀速圆周运动的水平面为零势面,设小球沿半径为R的轨道做匀速圆周运动时m1到水平板的距离为H,根据机械能守恒定律有 ③
③
以上三式联立解得 
解法二:(转化观点)与解法一相同,首先列出①②两式,然后再选小球、物体m1与地球组成的系统为研究对象,研究两物体间的轻线剪断后物体m1上升的过程,由于系统的机械能守恒,所以小球动能的减少量等于物体m1重力势能的增加量.即
 ④
④
①、②、④式联立解得
点评:比较上述两种解法可以看出,根据机械能守恒定律应用守恒观点列方程时,需要选零势面和找出物体与零势面的高度差,比较麻烦;如果应用转化观点列方程,则无需选零势面,往往显得简捷.
【例5】 解析:(1)第一颗子弹射入木块过程中动量守恒 ①
①
解得: =3m/s ②
=3m/s ②
木块向右作减速运动加速度 m/s2 ③
m/s2 ③
木块速度减小为零所用时间 ④
④
解得t1 =0.6s<1s ⑤
所以木块在被第二颗子弹击中前向右运动离A点最远时,速度为零,移动距离为
解得s1=0.9m. ⑥
(2)在第二颗子弹射中木块前,木块再向左作加速运动,时间t2=1s-0.6s=0.4s ⑦
速度增大为v2=at2=2m/s(恰与传送带同速) ⑧
向左移动的位移为 ⑨
⑨
所以两颗子弹射中木块的时间间隔内,木块总位移S0=S1-S2=0.5m方向向右 ⑩
第16颗子弹击中前,木块向右移动的位移为 11
11
第16颗子弹击中后,木块将会再向右先移动0.9m,总位移为0.9m+7.5=8.4m>8.3m木块将从B端落下.
所以木块在传送带上最多能被16颗子弹击中.
(3)第一颗子弹击穿木块过程中产生的热量为
 12
12
木块向右减速运动过程中板对传送带的位移为 13
13
产生的热量为Q2= 14
14
木块向左加速运动过程中相对传送带的位移为 15
15
产生的热量为 16
16
第16颗子弹射入后木块滑行时间为t3有 17
17
解得t3=0.4s 18
木块与传送带的相对位移为S=v1t3+0.8 19
产生的热量为Q4= 20
20
全过程中产生的热量为Q=15(Q1+Q2+Q3)+Q1+Q4
解得Q=14155.5J 21
【例6】 解析:运动分析:当小车被挡住时,物体落在小车上沿曲面向下滑动,对小车有斜向下方的压力,由于P的作用小车处于静止状态,物体离开小车时速度为v1,最终平抛落地,当去掉挡板,由于物对车的作用,小车将向左加速运动,动能增大,物体相对车滑动的同时,随车一起向左移动,整个过程机械能守恒,物体滑离小车时的动能将比在前一种情况下小,最终平抛落地,小车同时向前运动,所求距离是物体平抛过程中的水平位移与小车位移的和.求出此种情况下,物体离开车时的速度v2,及此时车的速度 以及相应运动的时间是关键,由于在物体与小车相互作用过程中水平方向动量守恒这是解决v2、间关系的具体方法.
以及相应运动的时间是关键,由于在物体与小车相互作用过程中水平方向动量守恒这是解决v2、间关系的具体方法.
(1)挡住小车时,求物体滑落时的速度v1,物体从最高点下落至滑离小车时机械能守恒,设车尾部(右端)离地面高为h,则有 , ①
, ①
由平抛运动的规律s0=v1t ②
 . ③
. ③
(2)设去掉挡板时物体离开小车时速度为v2,小车速度为,物体从最高点至离开小车之时系统机械能守恒 ④
④
物体与小车相互作用过程中水平方向动量守恒 . ⑤
. ⑤
此式不仅给出了v2与大小的关系,同时也说明了v2是向右的.
物体离开车后对地平抛  ⑥
⑥
 ⑦
⑦
车在 时间内向前的位移
时间内向前的位移 ⑧
⑧
比较式⑦、③,得 解式①、④、⑤,得
解式①、④、⑤,得 .
.
此种情况下落地点距车右端的距离
 .
.
点评:此题解题过程运用了机械能守恒、动量守恒及平抛运动的知识,另外根据动量守恒判断m离车时速度的方向及速度间的关系也是特别重要的.
【例7】 解析:(1)设第一次碰墙壁后,平板车向左移动s,速度为0.由于体系总动量向右,平板车速度为零时,滑块还在向右滑行.
由动能定理 ①
①
 ②
②
代入数据得 ③
③
(3)假如平板车在第二次碰撞前还未和滑块相对静止,那么其速度的大小肯定还是2m/s,滑块的速度则大于2m/s,方向均向右.这样就违反动量守恒.所以平板车在第二次碰撞前肯定已和滑块具有共同速度v.此即平板车碰墙前瞬间的速度.
 ④
④
∴ ⑤
⑤
代入数据得 ⑥
⑥
 (3)平板车与墙壁第一次碰撞后到滑块与平板又达到共同速度v前的过程,可用图(a)(b)(c)表示.(a)为平板车与墙壁撞后瞬间滑块与平板车的位置,图(b)为平板车到达最左端时两者的位置,图(c)为平板车与滑块再次达到共同速度为两者的位置.在此过程中滑块动能减少等于摩擦力对滑块所做功
(3)平板车与墙壁第一次碰撞后到滑块与平板又达到共同速度v前的过程,可用图(a)(b)(c)表示.(a)为平板车与墙壁撞后瞬间滑块与平板车的位置,图(b)为平板车到达最左端时两者的位置,图(c)为平板车与滑块再次达到共同速度为两者的位置.在此过程中滑块动能减少等于摩擦力对滑块所做功 ,平板车动能减少等于摩擦力对平板车所做功
,平板车动能减少等于摩擦力对平板车所做功 (平板车从B到A再回到B的过程中摩擦力做功为零),其中
(平板车从B到A再回到B的过程中摩擦力做功为零),其中 、
、 分别为滑块和平板车的位移.滑块和平板车动能总减少为
分别为滑块和平板车的位移.滑块和平板车动能总减少为 其中
其中 为滑块相对平板车的位移.此后,平板车与墙壁发生多次碰撞,每次情况与此类似,最后停在墙边.设滑块相对平板车总位移为l,则有
为滑块相对平板车的位移.此后,平板车与墙壁发生多次碰撞,每次情况与此类似,最后停在墙边.设滑块相对平板车总位移为l,则有 ⑦
⑦
 ⑧
⑧
代入数据得 ⑨
⑨
l即为平板车的最短长度.
【例8】 解析:本题应用动量守恒,机械能守恒及能量守恒定律联合求解。
在m下落在砂箱砂里的过程中,由于车与小泥球m在水平方向不受任何外力作用,故车及砂、泥球整个系统的水平方向动量守恒,则有:
 ①
①
此时物块A由于不受外力作用,继续向右做匀速直线运动再与轻弹簧相碰,以物块A、弹簧、车系统为研究对象,水平方向仍未受任何外力作用,系统动量守恒,当弹簧被压缩到最短,达最大弹性势能Ep时,整个系统的速度为v2,则由动量守恒和机械能守恒有:
 ②
②
 ③
③
由①②③式联立解得: ④
④
之后物块A相对地面仍向右做变减速运动,而相对车则向车的左面运动,直到脱离弹簧,获得对车向左的动能,设刚滑至车尾,则相对车静止,由能量守恒,弹性势能转化为系统克服摩擦力做功转化的内能有: ⑤
⑤
由④⑤两式得:
跟踪练习
1.【答案】 D
【解析】 在△t1时间内,I1=F△t1=mv=△p1,在△t2时间内.I2=F△t2=2mv-mv=mv=△p2 ∴I1=I2
又
∴W1<W2,D选项正确.
【说明】 物体在恒定的合外力F作用下做直线运动,由牛顿第二定律可知物体做匀加速直线运动,速度由零增大到v的时间△t2和由v增大到2v的时间△t2是相等的,所以在△t1和△t2的两段时间内合外力的冲量是相等的.在△t1的平均速度小于△t2时间内的平均速度,从而得出在△t1内的位移小于在△t2时间的位移,恒力F所做的功W1<W2.D选项正确.
2.【答案】 C
【解析】 无论子弹射入的深度如何,最终子弹和木块都等速,由动量守恒定律知,两种情况最终两木块(包括子弹)速度都相等.对木块由动能定理知:两次子弹对木块做功一样多.由动量定理知:两次木块所受冲量一样大.对系统由能的转化和守恒定律知,两次损失的机械能一样多,产生的热量也一样多.
3.【解析】 (1)物体由A滑到B的过程中,容器不脱离墙,物块由B沿球面向上滑时,物块对容器的作用力有一水平向右的分量,容器将脱离墙向右运动.因此,物块由A→B动量变化量最大,受容器的冲量最大,竖直墙作用于容器的冲量也最大.
物块由A→B机械能守恒,设物块滑到B的速度为vB,则
∴ ①
①
物块动量变化量 方向沿水平方向.容器作用于物块的冲量为
方向沿水平方向.容器作用于物块的冲量为 .
.
容器不动,墙对容器的冲量 ,方向水平向右,这是最大冲量.
,方向水平向右,这是最大冲量.
(2)物块从B处上升,容器向右运动过程中,系统水平方向动量守恒.物块上升到最高处相对容器静止的时刻,物块与容器具有共同的水平速度,设它为v,则由动量守恒定律得 ②
②
系统机械能守恒 ③
③
联立①②③式解得 M=3m
4.【解析】 设离子喷出尾喷管时的速度为v,单位时间内喷出n个离子,则△t时间内喷出离子数为n△t,由动量定理得
在发射离子过程中,卫星和发射出的离子系统,动量守恒,设喷出离子总质量为△m,则有△mv=(M-△m)v星 ∵△m m ∴v
m ∴v .
.


5.【解析】 (1)设整个过程摩擦力做的功是W,由动能定理得:mgh-W=0 ①
W=mgh
(2)设物块沿轨道AB滑动的加速度为a1,
由牛顿第二定律有 ②
②
设物块到达B点时的速度为VB,则有VB=a1t1 ③
设物块沿轨道BC滑动的加速度为a2,由牛顿第二定律有 ④
④
物块从B点开始作匀减速运动,到达C点时,速度为零,故有 ⑤
⑤
由②③④⑤式可得: ⑥
⑥
(3)使物块匀速地、缓慢地沿原路回到A点所需做的功应该是克服重力和阻力所做功之和,即是W1=mgh+W=2mgh
6.【解析】 (1)物体P从A下滑经B到C过程中根据动能定理:


经C点时
根据牛顿第三定律,P对C点的压力
(2)从C到E机械能守恒
E与D间高度差
(3)物体P最后在B与其等高的圆弧轨道上来回运动时,经C点压力最小,由B到C根据机械能守恒


根据牛顿第三定律 压力
7.【解析】 物块的运动可分为以下四个阶段:①弹簧弹力做功阶段;②离开弹簧后在AB段的匀速直线运动阶段;③从B到C所进行的变速圆周运动阶段;④离开C点后进行的平抛运动阶段.弹簧弹力是变化的,求弹簧弹力的功可根据效果――在弹力作用下物块获得的机械能,即到达B点的动能求解.物块从B至C克服阻力做的功也是变力,同样只能根据B点和C点两点的机械能之差判断.因此求出物块在B点和C点的动能是关键.可根据题设条件:“进入导轨瞬间对导轨的压力为其重力的7倍”、“恰能到达C点”,求出 .
.
物块在B点时受力mg和导轨的支持力N=7mg,由牛顿第二定律,
有
∴
物块到达C点仅受重力mg,根据牛顿第二定律,有
∴ .
.
(1)根据动能定理,可求得弹簧弹力对物体所做的功为W弹=EkB=3mgR.
(2)物体从B到C只有重力和阻力做功,根据动能定理,
有

即物体从B到C克服阻力做的功为0.5mgR.
(3)物体离开轨道后做平抛运动,仅有重力做功,机械能守恒,
有 .
.
评析:中学阶段不要求直接用
如图所示,在平行板电容器的两板之间,存在相互垂直的匀强磁场和匀强电场,磁感应强度B1=0.40T,方向垂直纸面向里,电场强度E=2.0×105V/m,PQ为板间中线.紧靠平行板右侧边缘xOy坐标系的第一象限内,有垂直纸面向外的匀强磁场,磁感应强度B2=0.25T,磁场边界AO和y轴的夹角∠AOy=45°.一束带电量q=8.0×10-19C的同位素正离子从P点射入平行板间,沿中线PQ做直线运动,穿出平行板后从y轴上坐标为(0,0.2m)的Q点垂直y轴射入磁场区,离子通过x轴时的速度方向与x轴正方向夹角在45°~90°之间,不计离子重力,求: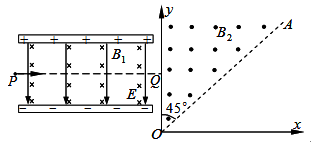
【小题1】离子运动的速度为多大?
【小题2】x轴上被离子打中的区间范围?
【小题3】离子从Q运动到x轴的最长时间?
【小题4】若只改变AOy区域内磁场的磁感应强度大小,使离子都不能打到x轴上,磁感应强度大小B2´应满足什么条件?
(14分)
(1)开普勒行星运动第三定律指出:行星绕太阳运动的椭圆轨道的半长轴a的三次方与它的公转周期T的二次方成正比,即![]() ,k是一个对所有行星都相同的常量。将行星绕太阳的运动按圆周运动处理,请你推导出太阳系中该常量k的表达式。已知引力常量为G,太阳的质量为M太。
,k是一个对所有行星都相同的常量。将行星绕太阳的运动按圆周运动处理,请你推导出太阳系中该常量k的表达式。已知引力常量为G,太阳的质量为M太。
(2)开普勒定律不仅适用于太阳系,它对一切具有中心天体的引力系统(如地月系统)都成立。经测定月地距离为3.84×108m,月球绕地球运动的周期为2.36×106S,试计算地球的质M地。(G=6.67×10-11Nm2/kg2,结果保留一位有效数字)
【解析】:(1)因行星绕太阳作匀速圆周运动,于是轨道的半长轴a即为轨道半径r。根据万有引力定律和牛顿第二定律有
![]() ①
①
于是有 ![]() ②
②
即 ![]() ③
③
(2)在月地系统中,设月球绕地球运动的轨道半径为R,周期为T,由②式可得
![]() ④
④
解得 M地=6×1024kg ⑤
(M地=5×1024kg也算对)
23.【题文】(16分)
 如图所示,在以坐标原点O为圆心、半径为R的半圆形区域内,有相互垂直的匀强电场和匀强磁场,磁感应强度为B,磁场方向垂直于xOy平面向里。一带正电的粒子(不计重力)从O点沿y轴正方向以某一速度射入,带电粒子恰好做匀速直线运动,经t0时间从P点射出。
如图所示,在以坐标原点O为圆心、半径为R的半圆形区域内,有相互垂直的匀强电场和匀强磁场,磁感应强度为B,磁场方向垂直于xOy平面向里。一带正电的粒子(不计重力)从O点沿y轴正方向以某一速度射入,带电粒子恰好做匀速直线运动,经t0时间从P点射出。
(1)求电场强度的大小和方向。
(2)若仅撤去磁场,带电粒子仍从O点以相同的速度射入,经![]() 时间恰从半圆形区域的边界射出。求粒子运动加速度的大小。
时间恰从半圆形区域的边界射出。求粒子运动加速度的大小。
(3)若仅撤去电场,带电粒子仍从O点射入,且速度为原来的4倍,求粒子在磁场中运动的时间。
查看习题详情和答案>>
第八部分 静电场
第一讲 基本知识介绍
在奥赛考纲中,静电学知识点数目不算多,总数和高考考纲基本相同,但在个别知识点上,奥赛的要求显然更加深化了:如非匀强电场中电势的计算、电容器的连接和静电能计算、电介质的极化等。在处理物理问题的方法上,对无限分割和叠加原理提出了更高的要求。
如果把静电场的问题分为两部分,那就是电场本身的问题、和对场中带电体的研究,高考考纲比较注重第二部分中带电粒子的运动问题,而奥赛考纲更注重第一部分和第二部分中的静态问题。也就是说,奥赛关注的是电场中更本质的内容,关注的是纵向的深化和而非横向的综合。
一、电场强度
1、实验定律
a、库仑定律
内容;
条件:⑴点电荷,⑵真空,⑶点电荷静止或相对静止。事实上,条件⑴和⑵均不能视为对库仑定律的限制,因为叠加原理可以将点电荷之间的静电力应用到一般带电体,非真空介质可以通过介电常数将k进行修正(如果介质分布是均匀和“充分宽广”的,一般认为k′= k /εr)。只有条件⑶,它才是静电学的基本前提和出发点(但这一点又是常常被忽视和被不恰当地“综合应用”的)。
b、电荷守恒定律
c、叠加原理
2、电场强度
a、电场强度的定义
电场的概念;试探电荷(检验电荷);定义意味着一种适用于任何电场的对电场的检测手段;电场线是抽象而直观地描述电场有效工具(电场线的基本属性)。
b、不同电场中场强的计算
决定电场强弱的因素有两个:场源(带电量和带电体的形状)和空间位置。这可以从不同电场的场强决定式看出——
⑴点电荷:E = k![]()
结合点电荷的场强和叠加原理,我们可以求出任何电场的场强,如——
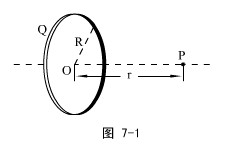
⑵均匀带电环,垂直环面轴线上的某点P:E = ![]() ,其中r和R的意义见图7-1。
,其中r和R的意义见图7-1。
⑶均匀带电球壳
内部:E内 = 0
外部:E外 = k![]() ,其中r指考察点到球心的距离
,其中r指考察点到球心的距离
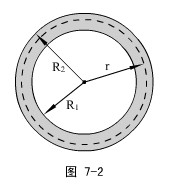
如果球壳是有厚度的的(内径R1 、外径R2),在壳体中(R1<r<R2):
E = ![]() ,其中ρ为电荷体密度。这个式子的物理意义可以参照万有引力定律当中(条件部分)的“剥皮法则”理解〔
,其中ρ为电荷体密度。这个式子的物理意义可以参照万有引力定律当中(条件部分)的“剥皮法则”理解〔![]() 即为图7-2中虚线以内部分的总电量…〕。
即为图7-2中虚线以内部分的总电量…〕。
⑷无限长均匀带电直线(电荷线密度为λ):E = ![]()
⑸无限大均匀带电平面(电荷面密度为σ):E = 2πkσ
二、电势
1、电势:把一电荷从P点移到参考点P0时电场力所做的功W与该电荷电量q的比值,即
U = ![]()
参考点即电势为零的点,通常取无穷远或大地为参考点。
和场强一样,电势是属于场本身的物理量。W则为电荷的电势能。
2、典型电场的电势
a、点电荷
以无穷远为参考点,U = k![]()
b、均匀带电球壳
以无穷远为参考点,U外 = k![]() ,U内 = k
,U内 = k![]()
3、电势的叠加
由于电势的是标量,所以电势的叠加服从代数加法。很显然,有了点电荷电势的表达式和叠加原理,我们可以求出任何电场的电势分布。
4、电场力对电荷做功
WAB = q(UA - UB)= qUAB
三、静电场中的导体
静电感应→静电平衡(狭义和广义)→静电屏蔽
1、静电平衡的特征可以总结为以下三层含义——
a、导体内部的合场强为零;表面的合场强不为零且一般各处不等,表面的合场强方向总是垂直导体表面。
b、导体是等势体,表面是等势面。
c、导体内部没有净电荷;孤立导体的净电荷在表面的分布情况取决于导体表面的曲率。
2、静电屏蔽
导体壳(网罩)不接地时,可以实现外部对内部的屏蔽,但不能实现内部对外部的屏蔽;导体壳(网罩)接地后,既可实现外部对内部的屏蔽,也可实现内部对外部的屏蔽。
四、电容
1、电容器
孤立导体电容器→一般电容器
2、电容
a、定义式 C = ![]()
b、决定式。决定电容器电容的因素是:导体的形状和位置关系、绝缘介质的种类,所以不同电容器有不同的电容
⑴平行板电容器 C = ![]() =
= ![]() ,其中ε为绝对介电常数(真空中ε0 =
,其中ε为绝对介电常数(真空中ε0 = ![]() ,其它介质中ε=
,其它介质中ε= ![]() ),εr则为相对介电常数,εr =
),εr则为相对介电常数,εr = ![]() 。
。
⑵柱形电容器:C = ![]()
⑶球形电容器:C = ![]()
3、电容器的连接
a、串联 ![]() =
= ![]() +
+![]() +
+![]() + … +
+ … +![]()
b、并联 C = C1 + C2 + C3 + … + Cn
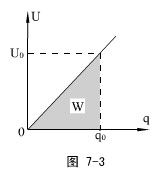
4、电容器的能量
用图7-3表征电容器的充电过程,“搬运”电荷做功W就是图中阴影的面积,这也就是电容器的储能E ,所以
E = ![]() q0U0 =
q0U0 = ![]() C
C![]() =
= ![]()
![]()
电场的能量。电容器储存的能量究竟是属于电荷还是属于电场?正确答案是后者,因此,我们可以将电容器的能量用场强E表示。
对平行板电容器 E总 = ![]() E2
E2
认为电场能均匀分布在电场中,则单位体积的电场储能 w = ![]() E2 。而且,这以结论适用于非匀强电场。
E2 。而且,这以结论适用于非匀强电场。
五、电介质的极化
1、电介质的极化
a、电介质分为两类:无极分子和有极分子,前者是指在没有外电场时每个分子的正、负电荷“重心”彼此重合(如气态的H2 、O2 、N2和CO2),后者则反之(如气态的H2O 、SO2和液态的水硝基笨)
b、电介质的极化:当介质中存在外电场时,无极分子会变为有极分子,有极分子会由原来的杂乱排列变成规则排列,如图7-4所示。
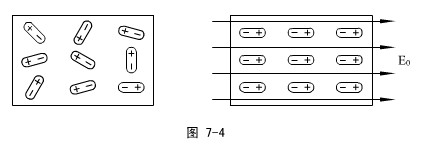
2、束缚电荷、自由电荷、极化电荷与宏观过剩电荷
a、束缚电荷与自由电荷:在图7-4中,电介质左右两端分别显现负电和正电,但这些电荷并不能自由移动,因此称为束缚电荷,除了电介质,导体中的原子核和内层电子也是束缚电荷;反之,能够自由移动的电荷称为自由电荷。事实上,导体中存在束缚电荷与自由电荷,绝缘体中也存在束缚电荷和自由电荷,只是它们的比例差异较大而已。
b、极化电荷是更严格意义上的束缚电荷,就是指图7-4中电介质两端显现的电荷。而宏观过剩电荷是相对极化电荷来说的,它是指可以自由移动的净电荷。宏观过剩电荷与极化电荷的重要区别是:前者能够用来冲放电,也能用仪表测量,但后者却不能。
第二讲 重要模型与专题
一、场强和电场力
【物理情形1】试证明:均匀带电球壳内部任意一点的场强均为零。
【模型分析】这是一个叠加原理应用的基本事例。
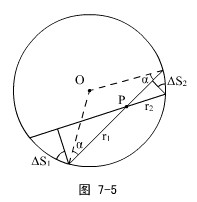
如图7-5所示,在球壳内取一点P ,以P为顶点做两个对顶的、顶角很小的锥体,锥体与球面相交得到球面上的两个面元ΔS1和ΔS2 ,设球面的电荷面密度为σ,则这两个面元在P点激发的场强分别为
ΔE1 = k![]()
ΔE2 = k![]()
为了弄清ΔE1和ΔE2的大小关系,引进锥体顶部的立体角ΔΩ ,显然
![]() = ΔΩ =
= ΔΩ = ![]()
所以 ΔE1 = k![]() ,ΔE2 = k
,ΔE2 = k![]() ,即:ΔE1 = ΔE2 ,而它们的方向是相反的,故在P点激发的合场强为零。
,即:ΔE1 = ΔE2 ,而它们的方向是相反的,故在P点激发的合场强为零。
同理,其它各个相对的面元ΔS3和ΔS4 、ΔS5和ΔS6 … 激发的合场强均为零。原命题得证。
【模型变换】半径为R的均匀带电球面,电荷的面密度为σ,试求球心处的电场强度。
【解析】如图7-6所示,在球面上的P处取一极小的面元ΔS ,它在球心O点激发的场强大小为
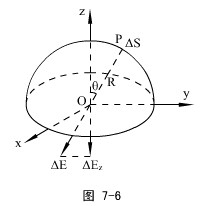
ΔE = k![]() ,方向由P指向O点。
,方向由P指向O点。
无穷多个这样的面元激发的场强大小和ΔS激发的完全相同,但方向各不相同,它们矢量合成的效果怎样呢?这里我们要大胆地预见——由于由于在x方向、y方向上的对称性,Σ![]() = Σ
= Σ![]() = 0 ,最后的ΣE = ΣEz ,所以先求
= 0 ,最后的ΣE = ΣEz ,所以先求
ΔEz = ΔEcosθ= k![]() ,而且ΔScosθ为面元在xoy平面的投影,设为ΔS′
,而且ΔScosθ为面元在xoy平面的投影,设为ΔS′
所以 ΣEz = ![]() ΣΔS′
ΣΔS′
而 ΣΔS′= πR2
【答案】E = kπσ ,方向垂直边界线所在的平面。
〖学员思考〗如果这个半球面在yoz平面的两边均匀带有异种电荷,面密度仍为σ,那么,球心处的场强又是多少?
〖推荐解法〗将半球面看成4个![]() 球面,每个
球面,每个![]() 球面在x、y、z三个方向上分量均为
球面在x、y、z三个方向上分量均为![]() kπσ,能够对称抵消的将是y、z两个方向上的分量,因此ΣE = ΣEx …
kπσ,能够对称抵消的将是y、z两个方向上的分量,因此ΣE = ΣEx …
〖答案〗大小为kπσ,方向沿x轴方向(由带正电的一方指向带负电的一方)。
【物理情形2】有一个均匀的带电球体,球心在O点,半径为R ,电荷体密度为ρ ,球体内有一个球形空腔,空腔球心在O′点,半径为R′,![]() = a ,如图7-7所示,试求空腔中各点的场强。
= a ,如图7-7所示,试求空腔中各点的场强。
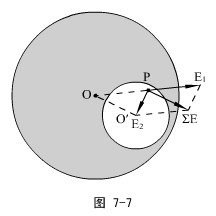
【模型分析】这里涉及两个知识的应用:一是均匀带电球体的场强定式(它也是来自叠加原理,这里具体用到的是球体内部的结论,即“剥皮法则”),二是填补法。
将球体和空腔看成完整的带正电的大球和带负电(电荷体密度相等)的小球的集合,对于空腔中任意一点P ,设![]() = r1 ,
= r1 ,![]() = r2 ,则大球激发的场强为
= r2 ,则大球激发的场强为
E1 = k![]() =
= ![]() kρπr1 ,方向由O指向P
kρπr1 ,方向由O指向P
“小球”激发的场强为
E2 = k![]() =
= ![]() kρπr2 ,方向由P指向O′
kρπr2 ,方向由P指向O′
E1和E2的矢量合成遵从平行四边形法则,ΣE的方向如图。又由于矢量三角形PE1ΣE和空间位置三角形OP O′是相似的,ΣE的大小和方向就不难确定了。
【答案】恒为![]() kρπa ,方向均沿O → O′,空腔里的电场是匀强电场。
kρπa ,方向均沿O → O′,空腔里的电场是匀强电场。
〖学员思考〗如果在模型2中的OO′连线上O′一侧距离O为b(b>R)的地方放一个电量为q的点电荷,它受到的电场力将为多大?
〖解说〗上面解法的按部就班应用…
〖答〗![]() πkρq〔
πkρq〔![]() ?
?![]() 〕。
〕。
二、电势、电量与电场力的功
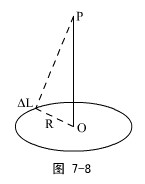
【物理情形1】如图7-8所示,半径为R的圆环均匀带电,电荷线密度为λ,圆心在O点,过圆心跟环面垂直的轴线上有P点,![]() = r ,以无穷远为参考点,试求P点的电势UP 。
= r ,以无穷远为参考点,试求P点的电势UP 。
【模型分析】这是一个电势标量叠加的简单模型。先在圆环上取一个元段ΔL ,它在P点形成的电势
ΔU = k![]()
环共有![]() 段,各段在P点形成的电势相同,而且它们是标量叠加。
段,各段在P点形成的电势相同,而且它们是标量叠加。
【答案】UP = ![]()
〖思考〗如果上题中知道的是环的总电量Q ,则UP的结论为多少?如果这个总电量的分布不是均匀的,结论会改变吗?
〖答〗UP = ![]() ;结论不会改变。
;结论不会改变。
〖再思考〗将环换成半径为R的薄球壳,总电量仍为Q ,试问:(1)当电量均匀分布时,球心电势为多少?球内(包括表面)各点电势为多少?(2)当电量不均匀分布时,球心电势为多少?球内(包括表面)各点电势为多少?
〖解说〗(1)球心电势的求解从略;
球内任一点的求解参看图7-5
ΔU1 = k![]() = k
= k![]() ·
·![]() = kσΔΩ
= kσΔΩ![]()
ΔU2 = kσΔΩ![]()
它们代数叠加成 ΔU = ΔU1 + ΔU2 = kσΔΩ![]()
而 r1 + r2 = 2Rcosα
所以 ΔU = 2RkσΔΩ
所有面元形成电势的叠加 ΣU = 2RkσΣΔΩ
注意:一个完整球面的ΣΔΩ = 4π(单位:球面度sr),但作为对顶的锥角,ΣΔΩ只能是2π ,所以——
ΣU = 4πRkσ= k![]()
(2)球心电势的求解和〖思考〗相同;
球内任一点的电势求解可以从(1)问的求解过程得到结论的反证。
〖答〗(1)球心、球内任一点的电势均为k![]() ;(2)球心电势仍为k
;(2)球心电势仍为k![]() ,但其它各点的电势将随电量的分布情况的不同而不同(内部不再是等势体,球面不再是等势面)。
,但其它各点的电势将随电量的分布情况的不同而不同(内部不再是等势体,球面不再是等势面)。
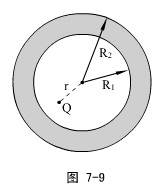
【相关应用】如图7-9所示,球形导体空腔内、外壁的半径分别为R1和R2 ,带有净电量+q ,现在其内部距球心为r的地方放一个电量为+Q的点电荷,试求球心处的电势。
【解析】由于静电感应,球壳的内、外壁形成两个带电球壳。球心电势是两个球壳形成电势、点电荷形成电势的合效果。
根据静电感应的尝试,内壁的电荷量为-Q ,外壁的电荷量为+Q+q ,虽然内壁的带电是不均匀的,根据上面的结论,其在球心形成的电势仍可以应用定式,所以…
【答案】Uo = k![]() - k
- k![]() + k
+ k![]() 。
。
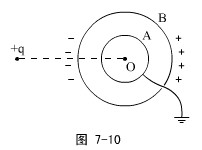
〖反馈练习〗如图7-10所示,两个极薄的同心导体球壳A和B,半径分别为RA和RB ,现让A壳接地,而在B壳的外部距球心d的地方放一个电量为+q的点电荷。试求:(1)A球壳的感应电荷量;(2)外球壳的电势。
〖解说〗这是一个更为复杂的静电感应情形,B壳将形成图示的感应电荷分布(但没有净电量),A壳的情形未画出(有净电量),它们的感应电荷分布都是不均匀的。
此外,我们还要用到一个重要的常识:接地导体(A壳)的电势为零。但值得注意的是,这里的“为零”是一个合效果,它是点电荷q 、A壳、B壳(带同样电荷时)单独存在时在A中形成的的电势的代数和,所以,当我们以球心O点为对象,有
UO = k![]() + k
+ k![]() + k
+ k![]() = 0
= 0
QB应指B球壳上的净电荷量,故 QB = 0
所以 QA = -![]() q
q
☆学员讨论:A壳的各处电势均为零,我们的方程能不能针对A壳表面上的某点去列?(答:不能,非均匀带电球壳的球心以外的点不能应用定式!)
基于刚才的讨论,求B的电势时也只能求B的球心的电势(独立的B壳是等势体,球心电势即为所求)——
UB = k![]() + k
+ k![]()
〖答〗(1)QA = -![]() q ;(2)UB = k
q ;(2)UB = k![]() (1-
(1-![]() ) 。
) 。
【物理情形2】图7-11中,三根实线表示三根首尾相连的等长绝缘细棒,每根棒上的电荷分布情况与绝缘棒都换成导体棒时完全相同。点A是Δabc的中心,点B则与A相对bc棒对称,且已测得它们的电势分别为UA和UB 。试问:若将ab棒取走,A、B两点的电势将变为多少?
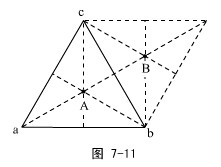
【模型分析】由于细棒上的电荷分布既不均匀、三根细棒也没有构成环形,故前面的定式不能直接应用。若用元段分割→叠加,也具有相当的困难。所以这里介绍另一种求电势的方法。
每根细棒的电荷分布虽然复杂,但相对各自的中点必然是对称的,而且三根棒的总电量、分布情况彼此必然相同。这就意味着:①三棒对A点的电势贡献都相同(可设为U1);②ab棒、ac棒对B点的电势贡献相同(可设为U2);③bc棒对A、B两点的贡献相同(为U1)。
所以,取走ab前 3U1 = UA
2U2 + U1 = UB
取走ab后,因三棒是绝缘体,电荷分布不变,故电势贡献不变,所以
UA′= 2U1
UB′= U1 + U2
【答案】UA′= ![]() UA ;UB′=
UA ;UB′= ![]() UA +
UA + ![]() UB 。
UB 。
〖模型变换〗正四面体盒子由彼此绝缘的四块导体板构成,各导体板带电且电势分别为U1 、U2 、U3和U4 ,则盒子中心点O的电势U等于多少?
〖解说〗此处的四块板子虽然位置相对O点具有对称性,但电量各不相同,因此对O点的电势贡献也不相同,所以应该想一点办法——
我们用“填补法”将电量不对称的情形加以改观:先将每一块导体板复制三块,作成一个正四面体盒子,然后将这四个盒子位置重合地放置——构成一个有四层壁的新盒子。在这个新盒子中,每个壁的电量将是完全相同的(为原来四块板的电量之和)、电势也完全相同(为U1 + U2 + U3 + U4),新盒子表面就构成了一个等势面、整个盒子也是一个等势体,故新盒子的中心电势为
U′= U1 + U2 + U3 + U4
最后回到原来的单层盒子,中心电势必为 U = ![]() U′
U′
〖答〗U = ![]() (U1 + U2 + U3 + U4)。
(U1 + U2 + U3 + U4)。
☆学员讨论:刚才的这种解题思想是否适用于“物理情形2”?(答:不行,因为三角形各边上电势虽然相等,但中点的电势和边上的并不相等。)
〖反馈练习〗电荷q均匀分布在半球面ACB上,球面半径为R ,CD为通过半球顶点C和球心O的轴线,如图7-12所示。P、Q为CD轴线上相对O点对称的两点,已知P点的电势为UP ,试求Q点的电势UQ 。
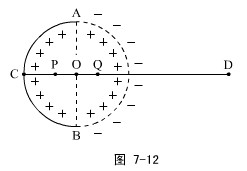
〖解说〗这又是一个填补法的应用。将半球面补成完整球面,并令右边内、外层均匀地带上电量为q的电荷,如图7-12所示。
从电量的角度看,右半球面可以看作不存在,故这时P、Q的电势不会有任何改变。
而换一个角度看,P、Q的电势可以看成是两者的叠加:①带电量为2q的完整球面;②带电量为-q的半球面。
考查P点,UP = k![]() + U半球面
+ U半球面
其中 U半球面显然和为填补时Q点的电势大小相等、符号相反,即 U半球面= -UQ
以上的两个关系已经足以解题了。
〖答〗UQ = k![]() - UP 。
- UP 。
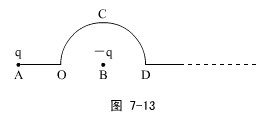
【物理情形3】如图7-13所示,A、B两点相距2L ,圆弧![]() 是以B为圆心、L为半径的半圆。A处放有电量为q的电荷,B处放有电量为-q的点电荷。试问:(1)将单位正电荷从O点沿
是以B为圆心、L为半径的半圆。A处放有电量为q的电荷,B处放有电量为-q的点电荷。试问:(1)将单位正电荷从O点沿![]() 移到D点,电场力对它做了多少功?(2)将单位负电荷从D点沿AB的延长线移到无穷远处去,电场力对它做多少功?
移到D点,电场力对它做了多少功?(2)将单位负电荷从D点沿AB的延长线移到无穷远处去,电场力对它做多少功?
【模型分析】电势叠加和关系WAB = q(UA - UB)= qUAB的基本应用。
UO = k![]() + k
+ k![]() = 0
= 0
UD = k![]() + k
+ k![]() = -
= -![]()
U∞ = 0
再用功与电势的关系即可。
【答案】(1)![]() ;(2)
;(2)![]() 。
。
【相关应用】在不计重力空间,有A、B两个带电小球,电量分别为q1和q2 ,质量分别为m1和m2 ,被固定在相距L的两点。试问:(1)若解除A球的固定,它能获得的最大动能是多少?(2)若同时解除两球的固定,它们各自的获得的最大动能是多少?(3)未解除固定时,这个系统的静电势能是多少?
【解说】第(1)问甚间;第(2)问在能量方面类比反冲装置的能量计算,另启用动量守恒关系;第(3)问是在前两问基础上得出的必然结论…(这里就回到了一个基本的观念斧正:势能是属于场和场中物体的系统,而非单纯属于场中物体——这在过去一直是被忽视的。在两个点电荷的环境中,我们通常说“两个点电荷的势能”是多少。)
【答】(1)k![]() ;(2)Ek1 =
;(2)Ek1 = ![]() k
k![]() ,Ek2 =
,Ek2 = ![]() k
k![]() ;(3)k
;(3)k![]() 。
。
〖思考〗设三个点电荷的电量分别为q1 、q2和q3 ,两两相距为r12 、r23和r31 ,则这个点电荷系统的静电势能是多少?
〖解〗略。
〖答〗k(![]() +
+![]() +
+![]() )。
)。
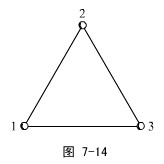
〖反馈应用〗如图7-14所示,三个带同种电荷的相同金属小球,每个球的质量均为m 、电量均为q ,用长度为L的三根绝缘轻绳连接着,系统放在光滑、绝缘的水平面上。现将其中的一根绳子剪断,三个球将开始运动起来,试求中间这个小球的最大速度。
〖解〗设剪断的是1、3之间的绳子,动力学分析易知,2球获得最大动能时,1、2之间的绳子与2、3之间的绳子刚好应该在一条直线上。而且由动量守恒知,三球不可能有沿绳子方向的速度。设2球的速度为v ,1球和3球的速度为v′,则
动量关系 mv + 2m v′= 0
能量关系 3k![]() = 2 k
= 2 k![]() + k
+ k![]() +
+ ![]() mv2 +
mv2 + ![]() 2m
2m![]()
解以上两式即可的v值。
〖答〗v = q![]() 。
。
三、电场中的导体和电介质
【物理情形】两块平行放置的很大的金属薄板A和B,面积都是S ,间距为d(d远小于金属板的线度),已知A板带净电量+Q1 ,B板带尽电量+Q2 ,且Q2<Q1 ,试求:(1)两板内外表面的电量分别是多少;(2)空间各处的场强;(3)两板间的电势差。
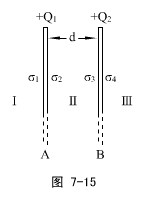
【模型分析】由于静电感应,A、B两板的四个平面的电量将呈现一定规律的分布(金属板虽然很薄,但内部合场强为零的结论还是存在的);这里应注意金属板“很大”的前提条件,它事实上是指物理无穷大,因此,可以应用无限大平板的场强定式。
为方便解题,做图7-15,忽略边缘效应,四个面的电荷分布应是均匀的,设四个面的电荷面密度分别为σ1 、σ2 、σ3和σ4 ,显然
(σ1 + σ2)S = Q1
(σ3 + σ4)S = Q2
A板内部空间场强为零,有 2πk(σ1 ? σ2 ? σ3 ? σ4)= 0
A板内部空间场强为零,有 2πk(σ1 + σ2 + σ3 ? σ4)= 0
解以上四式易得 σ1 = σ4 = ![]()
σ2 = ?σ3 = ![]()
有了四个面的电荷密度,Ⅰ、Ⅱ、Ⅲ空间的场强就好求了〔如EⅡ =2πk(σ1 + σ2 ? σ3 ? σ4)= 2πk![]() 〕。
〕。
最后,UAB = EⅡd
【答案】(1)A板外侧电量![]() 、A板内侧电量
、A板内侧电量![]() ,B板内侧电量?
,B板内侧电量?![]() 、B板外侧电量
、B板外侧电量![]() ;(2)A板外侧空间场强2πk
;(2)A板外侧空间场强2πk![]() ,方向垂直A板向外,A、B板之间空间场强2πk
,方向垂直A板向外,A、B板之间空间场强2πk![]() ,方向由A垂直指向B,B板外侧空间场强2πk
,方向由A垂直指向B,B板外侧空间场强2πk![]() ,方向垂直B板向外;(3)A、B两板的电势差为2πkd
,方向垂直B板向外;(3)A、B两板的电势差为2πkd![]() ,A板电势高。
,A板电势高。
〖学员思考〗如果两板带等量异号的净电荷,两板的外侧空间场强等于多少?(答:为零。)
〖学员讨论〗(原模型中)作为一个电容器,它的“电量”是多少(答:![]() )?如果在板间充满相对介电常数为εr的电介质,是否会影响四个面的电荷分布(答:不会)?是否会影响三个空间的场强(答:只会影响Ⅱ空间的场强)?
)?如果在板间充满相对介电常数为εr的电介质,是否会影响四个面的电荷分布(答:不会)?是否会影响三个空间的场强(答:只会影响Ⅱ空间的场强)?
〖学员讨论〗(原模型中)我们是否可以求出A、B两板之间的静电力?〔答:可以;以A为对象,外侧受力![]() ·
·![]() (方向相左),内侧受力
(方向相左),内侧受力![]() ·
·![]() (方向向右),它们合成即可,结论为F =
(方向向右),它们合成即可,结论为F = ![]() Q1Q2 ,排斥力。〕
Q1Q2 ,排斥力。〕

【模型变换】如图7-16所示,一平行板电容器,极板面积为S ,其上半部为真空,而下半部充满相对介电常数为εr的均匀电介质,当两极板分别带上+Q和?Q的电量后,试求:(1)板上自由电荷的分布;(2)两板之间的场强;(3)介质表面的极化电荷。
【解说】电介质的充入虽然不能改变内表面的电量总数,但由于改变了场强,故对电荷的分布情况肯定有影响。设真空部分电量为Q1 ,介质部分电量为Q2 ,显然有
Q1 + Q2 = Q
两板分别为等势体,将电容器看成上下两个电容器的并联,必有
U1 = U2 即 ![]() =
= ![]() ,即
,即 ![]() =
= ![]()
解以上两式即可得Q1和Q2 。
场强可以根据E = ![]() 关系求解,比较常规(上下部分的场强相等)。
关系求解,比较常规(上下部分的场强相等)。
上下部分的电量是不等的,但场强居然相等,这怎么解释?从公式的角度看,E = 2πkσ(单面平板),当k 、σ同时改变,可以保持E不变,但这是一种结论所展示的表象。从内在的角度看,k的改变正是由于极化电荷的出现所致,也就是说,极化电荷的存在相当于在真空中形成了一个新的电场,正是这个电场与自由电荷(在真空中)形成的电场叠加成为E2 ,所以
E2 = 4πk(σ ? σ′)= 4πk(![]() ?
? ![]() )
)
请注意:①这里的σ′和Q′是指极化电荷的面密度和总量;② E = 4πkσ的关系是由两个带电面叠加的合效果。
【答案】(1)真空部分的电量为![]() Q ,介质部分的电量为
Q ,介质部分的电量为![]() Q ;(2)整个空间的场强均为
Q ;(2)整个空间的场强均为![]() ;(3)
;(3)![]() Q 。
Q 。
〖思考应用〗一个带电量为Q的金属小球,周围充满相对介电常数为εr的均匀电介质,试求与与导体表面接触的介质表面的极化电荷量。
〖解〗略。
〖答〗Q′= ![]() Q 。
Q 。
四、电容器的相关计算
【物理情形1】由许多个电容为C的电容器组成一个如图7-17所示的多级网络,试问:(1)在最后一级的右边并联一个多大电容C′,可使整个网络的A、B两端电容也为C′?(2)不接C′,但无限地增加网络的级数,整个网络A、B两端的总电容是多少?
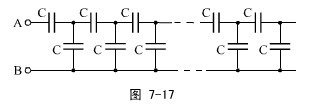
【模型分析】这是一个练习电容电路简化基本事例。
第(1)问中,未给出具体级数,一般结论应适用特殊情形:令级数为1 ,于是
![]() +
+ ![]() =
= ![]() 解C′即可。
解C′即可。
第(2)问中,因为“无限”,所以“无限加一级后仍为无限”,不难得出方程
![]() +
+ ![]() =
= ![]()
【答案】(1)![]() C ;(2)
C ;(2)![]() C 。
C 。
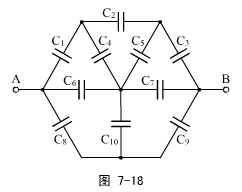
【相关模型】在图7-18所示的电路中,已知C1 = C2 = C3 = C9 = 1μF ,C4 = C5 = C6 = C7 = 2μF ,C8 = C10 = 3μF ,试求A、B之间的等效电容。
【解说】对于既非串联也非并联的电路,需要用到一种“Δ→Y型变换”,参见图7-19,根据三个端点之间的电容等效,容易得出定式——
Δ→Y型:Ca = ![]()
Cb = ![]()
Cc = ![]()
Y→Δ型:C1 = ![]()
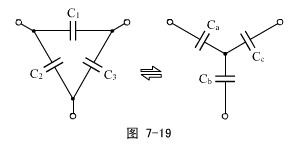
C2 = ![]()
C3 = ![]()
有了这样的定式后,我们便可以进行如图7-20所示的四步电路简化(为了方便,电容不宜引进新的符号表达,而是直接将变换后的量值标示在图中)——
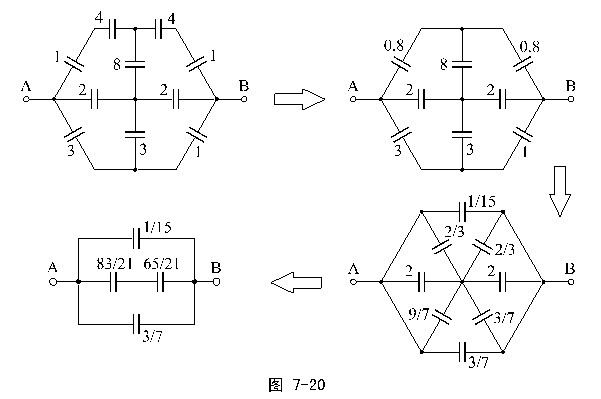
【答】约2.23μF 。
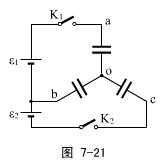
【物理情形2】如图7-21所示的电路中,三个电容器完全相同,电源电动势ε1 = 3.0V ,ε2 = 4.5V,开关K1和K2接通前电容器均未带电,试求K1和K2接通后三个电容器的电压Uao 、Ubo和Uco各为多少。
【解说】这是一个考查电容器电路的基本习题,解题的关键是要抓与o相连的三块极板(俗称“孤岛”)的总电量为零。
电量关系:![]() +
+![]() +
+![]() = 0
= 0
电势关系:ε1 = Uao + Uob = Uao ? Ubo
ε2 = Ubo + Uoc = Ubo ? Uco
解以上三式即可。
【答】Uao = 3.5V ,Ubo = 0.5V ,Uco = ?4.0V 。
【伸展应用】如图7-22所示,由n个单元组成的电容器网络,每一个单元由三个电容器连接而成,其中有两个的电容为3C ,另一个的电容为3C 。以a、b为网络的输入端,a′、b′为输出端,今在a、b间加一个恒定电压U ,而在a′b′间接一个电容为C的电容器,试求:(1)从第k单元输入端算起,后面所有电容器储存的总电能;(2)若把第一单元输出端与后面断开,再除去电源,并把它的输入端短路,则这个单元的三个电容器储存的总电能是多少?
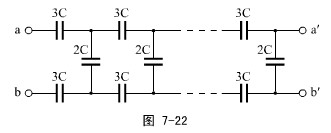
【解说】这是一个结合网络计算和“孤岛现象”的典型事例。
(1)类似“物理情形1”的计算,可得 C总 = Ck = C
所以,从输入端算起,第k单元后的电压的经验公式为 Uk = ![]()
再算能量储存就不难了。
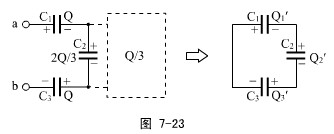
(2)断开前,可以算出第一单元的三个电容器、以及后面“系统”的电量分配如图7-23中的左图所示。这时,C1的右板和C2的左板(或C2的下板和C3的右板)形成“孤岛”。此后,电容器的相互充电过程(C3类比为“电源”)满足——
电量关系:Q1′= Q3′
Q2′+ Q3′= ![]()
电势关系:![]() +
+ ![]() =
= ![]()
从以上三式解得 Q1′= Q3′= ![]() ,Q2′=
,Q2′= ![]() ,这样系统的储能就可以用
,这样系统的储能就可以用![]()
![]() 得出了。
得出了。
【答】(1)Ek = ![]() ;(2)
;(2)![]() 。
。
〖学员思考〗图7-23展示的过程中,始末状态的电容器储能是否一样?(答:不一样;在相互充电的过程中,导线消耗的焦耳热已不可忽略。)
☆第七部分完☆
查看习题详情和答案>>