网址:http://m.1010jiajiao.com/timu_id_528400[举报]
如图1所示,为利用光敏电阻检测传送带上物品分布从而了解生产线运行是否运行正常的仪器。期中A是发光仪器,B是一端留有小孔用绝缘材料封装的光敏电阻。当传送带上没有物品挡住由A射向B的光信号时,光敏电阻阻值为R1=50Ω;当传送带上有物品挡住由A射向B的光信号时,光敏电阻阻值为R2=150Ω。固定电阻R3=45Ω。C为平行板电容器,虚线与两极板间距相等,极板长L1=8.0×10-2m,两极板的间距d=1.0×10-2m。D为屏,与极板垂直,D到极板的距离L2=0.16m,屏上贴有用特殊材料做成的记录纸,当电子打在记录纸上时会留下黑点,工作时屏沿着图示方向匀速运动。有一细电阻束沿图中虚线以速度v0=8.0×106m/s连续不断地射入电容C,v0延长线与屏交点为O。图2为一段记录纸。
已知电子电量e=1.6×10-19C,电子质量m=9×10-31kg。忽略细光束的宽度、电容器的充电放点时间及电子所受的重力。求:电源的电动势E和内阻r。

已知电子电量e=1.6×10-19C,电子质量m=9×10-31kg。忽略细光束的宽度、电容器的充电放点时间及电子所受的重力。求:电源的电动势E和内阻r。

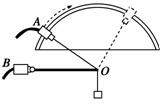
如下图所示,某小组同学利用DIS实验装置研究支架上力的分解。A、B为两个相同的双向力传感器,该型号传感器在受到拉力时读数为正,受到压力时读数为负。A连接质量不计的细绳,可沿固定的板做圆弧形移动。B固定不动,通过光滑铰链连接长0.3 m的杆。将细绳连接在杆右端O点构成支架。保持杆在水平方向,按如下步骤操作:

① 测量绳子与水平杆的夹角∠AOB=θ
② 对两个传感器进行调零
③ 用另一绳在O点悬挂一个钩码,记录两个传感器读数
④ 取下钩码,移动传感器A改变θ角重复上述实验步骤,得到表格:

(1)根据表格A传感器对应的是表中力___▲____(选填“F1”或“F2”)。钩码质量为___▲___kg(保留1位有效数字)。
(2)本实验中多次对传感器进行调零,对此操作说明正确的是 ▲
A.因为事先忘记调零
B.何时调零对实验结果没有影响
C.为了消除横杆自身重力对结果的影响
D.可以完全消除实验的误差
查看习题详情和答案>>
如下图所示,某小组同学利用DIS实验装置研究支架上力的分解。A、B为两个相同的双向力传感器,该型号传感器在受到拉力时读数为正,受到压力时读数为负。A连接质量不计的细绳,可沿固定的板做圆弧形移动。B固定不动,通过光滑铰链连接长0.3 m的杆。将细绳连接在杆右端O点构成支架。保持杆在水平方向,按如下步骤操作:
① 测量绳子与水平杆的夹角∠AOB=θ
② 对两个传感器进行调零
③ 用另一绳在O点悬挂一个钩码,记录两个传感器读数
④ 取下钩码,移动传感器A改变θ角重复上述实验步骤,得到表格:

(1)根据表格A传感器对应的是表中力___▲____(选填“F1”或“F2”)。钩码质量为___▲___kg(保留1位有效数字)。
(2)本实验中多次对传感器进行调零,对此操作说明正确的是 ▲
A.因为事先忘记调零
B.何时调零对实验结果没有影响
C.为了消除横杆自身重力对结果的影响
D.可以完全消除实验的误差
如下图所示,某小组同学利用DIS实验装置研究支架上力的分解。A、B为两个相同的双向力传感器,该型号传感器在受到拉力时读数为正,受到压力时读数为负。A连接质量不计的细绳,可沿固定的板做圆弧形移动。B固定不动,通过光滑铰链连接长0.3 m的杆。将细绳连接在杆右端O点构成支架。保持杆在水平方向,按如下步骤操作:
① 测量绳子与水平杆的夹角∠AOB=θ
② 对两个传感器进行调零
③ 用另一绳在O点悬挂一个钩码,记录两个传感器读数
④ 取下钩码,移动传感器A改变θ角重复上述实验步骤,得到表格:
(1)根据表格A传感器对应的是表中力___▲____(选填“F1”或“F2”)。钩码质量为___▲___kg(保留1位有效数字)。
(2)本实验中多次对传感器进行调零,对此操作说明正确的是 ▲
A.因为事先忘记调零
B.何时调零对实验结果没有影响
C.为了消除横杆自身重力对结果的影响
D.可以完全消除实验的误差
查看习题详情和答案>>