网址:http://m.1010jiajiao.com/timu_id_469781[举报]
第一部分 力&物体的平衡
第一讲 力的处理
一、矢量的运算
1、加法
表达:![]() +
+ ![]() =
= ![]() 。
。
名词:![]() 为“和矢量”。
为“和矢量”。
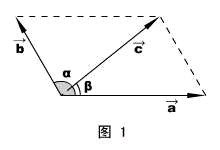
法则:平行四边形法则。如图1所示。
和矢量大小:c = ![]() ,其中α为
,其中α为![]() 和
和![]() 的夹角。
的夹角。
和矢量方向:![]() 在
在![]() 、
、![]() 之间,和
之间,和![]() 夹角β= arcsin
夹角β= arcsin![]()
2、减法
表达:![]() =
= ![]() -
-![]() 。
。
名词:![]() 为“被减数矢量”,
为“被减数矢量”,![]() 为“减数矢量”,
为“减数矢量”,![]() 为“差矢量”。
为“差矢量”。
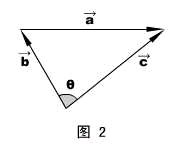
法则:三角形法则。如图2所示。将被减数矢量和减数矢量的起始端平移到一点,然后连接两时量末端,指向被减数时量的时量,即是差矢量。
差矢量大小:a = ![]() ,其中θ为
,其中θ为![]() 和
和![]() 的夹角。
的夹角。
差矢量的方向可以用正弦定理求得。
一条直线上的矢量运算是平行四边形和三角形法则的特例。
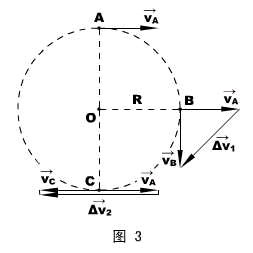
例题:已知质点做匀速率圆周运动,半径为R ,周期为T ,求它在![]() T内和在
T内和在![]() T内的平均加速度大小。
T内的平均加速度大小。
解说:如图3所示,A到B点对应![]() T的过程,A到C点对应
T的过程,A到C点对应![]() T的过程。这三点的速度矢量分别设为
T的过程。这三点的速度矢量分别设为![]() 、
、![]() 和
和![]() 。
。
根据加速度的定义 ![]() =
= ![]() 得:
得:![]() =
= ![]() ,
,![]() =
= ![]()
由于有两处涉及矢量减法,设两个差矢量 ![]() =
= ![]() -
-![]() ,
,![]() =
= ![]() -
-![]() ,根据三角形法则,它们在图3中的大小、方向已绘出(
,根据三角形法则,它们在图3中的大小、方向已绘出(![]() 的“三角形”已被拉伸成一条直线)。
的“三角形”已被拉伸成一条直线)。
本题只关心各矢量的大小,显然:
![]() =
= ![]() =
= ![]() =
= ![]() ,且:
,且:![]() =
= ![]()
![]() =
= ![]() ,
,![]() = 2
= 2![]() =
= ![]()
所以:![]() =
= ![]() =
=  =
= ![]() ,
,![]() =
= ![]() =
= ![]() =
= ![]() 。
。
(学生活动)观察与思考:这两个加速度是否相等,匀速率圆周运动是不是匀变速运动?
答:否;不是。
3、乘法
矢量的乘法有两种:叉乘和点乘,和代数的乘法有着质的不同。
⑴ 叉乘
表达:![]() ×
×![]() =
= ![]()
名词:![]() 称“矢量的叉积”,它是一个新的矢量。
称“矢量的叉积”,它是一个新的矢量。
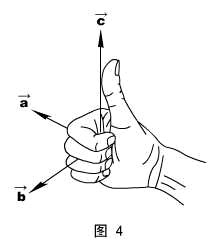
叉积的大小:c = absinα,其中α为![]() 和
和![]() 的夹角。意义:
的夹角。意义:![]() 的大小对应由
的大小对应由![]() 和
和![]() 作成的平行四边形的面积。
作成的平行四边形的面积。
叉积的方向:垂直![]() 和
和![]() 确定的平面,并由右手螺旋定则确定方向,如图4所示。
确定的平面,并由右手螺旋定则确定方向,如图4所示。
显然,![]() ×
×![]() ≠
≠![]() ×
×![]() ,但有:
,但有:![]() ×
×![]() = -
= -![]() ×
×![]()
⑵ 点乘
表达:![]() ·
·![]() = c
= c
名词:c称“矢量的点积”,它不再是一个矢量,而是一个标量。
点积的大小:c = abcosα,其中α为![]() 和
和![]() 的夹角。
的夹角。
二、共点力的合成
1、平行四边形法则与矢量表达式
2、一般平行四边形的合力与分力的求法
余弦定理(或分割成RtΔ)解合力的大小
正弦定理解方向
三、力的分解
1、按效果分解
2、按需要——正交分解
第二讲 物体的平衡
一、共点力平衡
1、特征:质心无加速度。
2、条件:Σ![]() = 0 ,或
= 0 ,或 ![]() = 0 ,
= 0 ,![]() = 0
= 0
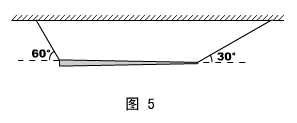
例题:如图5所示,长为L 、粗细不均匀的横杆被两根轻绳水平悬挂,绳子与水平方向的夹角在图上已标示,求横杆的重心位置。
解说:直接用三力共点的知识解题,几何关系比较简单。
答案:距棒的左端L/4处。
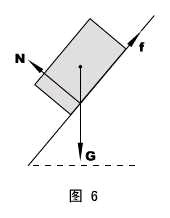
(学生活动)思考:放在斜面上的均质长方体,按实际情况分析受力,斜面的支持力会通过长方体的重心吗?
解:将各处的支持力归纳成一个N ,则长方体受三个力(G 、f 、N)必共点,由此推知,N不可能通过长方体的重心。正确受力情形如图6所示(通常的受力图是将受力物体看成一个点,这时,N就过重心了)。
答:不会。
二、转动平衡
1、特征:物体无转动加速度。
2、条件:Σ![]() = 0 ,或ΣM+ =ΣM-
= 0 ,或ΣM+ =ΣM-
如果物体静止,肯定会同时满足两种平衡,因此用两种思路均可解题。
3、非共点力的合成
大小和方向:遵从一条直线矢量合成法则。
作用点:先假定一个等效作用点,然后让所有的平行力对这个作用点的和力矩为零。
第三讲 习题课
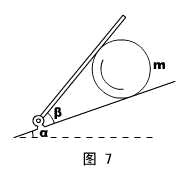
1、如图7所示,在固定的、倾角为α斜面上,有一块可以转动的夹板(β不定),夹板和斜面夹着一个质量为m的光滑均质球体,试求:β取何值时,夹板对球的弹力最小。
解说:法一,平行四边形动态处理。
对球体进行受力分析,然后对平行四边形中的矢量G和N1进行平移,使它们构成一个三角形,如图8的左图和中图所示。
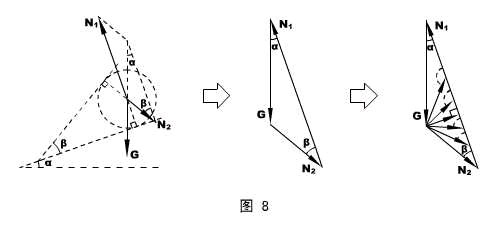
由于G的大小和方向均不变,而N1的方向不可变,当β增大导致N2的方向改变时,N2的变化和N1的方向变化如图8的右图所示。
显然,随着β增大,N1单调减小,而N2的大小先减小后增大,当N2垂直N1时,N2取极小值,且N2min = Gsinα。
法二,函数法。
看图8的中间图,对这个三角形用正弦定理,有:
![]() =
= ![]() ,即:N2 =
,即:N2 = ![]() ,β在0到180°之间取值,N2的极值讨论是很容易的。
,β在0到180°之间取值,N2的极值讨论是很容易的。
答案:当β= 90°时,甲板的弹力最小。
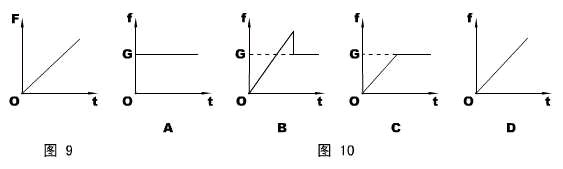
2、把一个重为G的物体用一个水平推力F压在竖直的足够高的墙壁上,F随时间t的变化规律如图9所示,则在t = 0开始物体所受的摩擦力f的变化图线是图10中的哪一个?
解说:静力学旨在解决静态问题和准静态过程的问题,但本题是一个例外。物体在竖直方向的运动先加速后减速,平衡方程不再适用。如何避开牛顿第二定律,是本题授课时的难点。
静力学的知识,本题在于区分两种摩擦的不同判据。
水平方向合力为零,得:支持力N持续增大。
物体在运动时,滑动摩擦力f = μN ,必持续增大。但物体在静止后静摩擦力f′≡ G ,与N没有关系。
对运动过程加以分析,物体必有加速和减速两个过程。据物理常识,加速时,f < G ,而在减速时f > G 。
答案:B 。
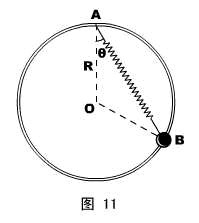
3、如图11所示,一个重量为G的小球套在竖直放置的、半径为R的光滑大环上,另一轻质弹簧的劲度系数为k ,自由长度为L(L<2R),一端固定在大圆环的顶点A ,另一端与小球相连。环静止平衡时位于大环上的B点。试求弹簧与竖直方向的夹角θ。
解说:平行四边形的三个矢量总是可以平移到一个三角形中去讨论,解三角形的典型思路有三种:①分割成直角三角形(或本来就是直角三角形);②利用正、余弦定理;③利用力学矢量三角形和某空间位置三角形相似。本题旨在贯彻第三种思路。
分析小球受力→矢量平移,如图12所示,其中F表示弹簧弹力,N表示大环的支持力。
(学生活动)思考:支持力N可不可以沿图12中的反方向?(正交分解看水平方向平衡——不可以。)
容易判断,图中的灰色矢量三角形和空间位置三角形ΔAOB是相似的,所以:
![]() ⑴
⑴
由胡克定律:F = k(![]() - R) ⑵
- R) ⑵
几何关系:![]() = 2Rcosθ ⑶
= 2Rcosθ ⑶
解以上三式即可。

答案:arccos![]() 。
。
(学生活动)思考:若将弹簧换成劲度系数k′较大的弹簧,其它条件不变,则弹簧弹力怎么变?环的支持力怎么变?
答:变小;不变。
(学生活动)反馈练习:光滑半球固定在水平面上,球心O的正上方有一定滑轮,一根轻绳跨过滑轮将一小球从图13所示的A位置开始缓慢拉至B位置。试判断:在此过程中,绳子的拉力T和球面支持力N怎样变化?
解:和上题完全相同。
答:T变小,N不变。
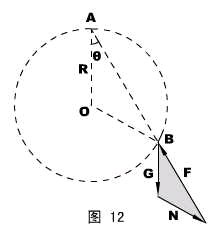
4、如图14所示,一个半径为R的非均质圆球,其重心不在球心O点,先将它置于水平地面上,平衡时球面上的A点和地面接触;再将它置于倾角为30°的粗糙斜面上,平衡时球面上的B点与斜面接触,已知A到B的圆心角也为30°。试求球体的重心C到球心O的距离。
解说:练习三力共点的应用。
根据在平面上的平衡,可知重心C在OA连线上。根据在斜面上的平衡,支持力、重力和静摩擦力共点,可以画出重心的具体位置。几何计算比较简单。
答案:![]() R 。
R 。
(学生活动)反馈练习:静摩擦足够,将长为a 、厚为b的砖块码在倾角为θ的斜面上,最多能码多少块?
解:三力共点知识应用。
答:![]() 。
。
4、两根等长的细线,一端拴在同一悬点O上,另一端各系一个小球,两球的质量分别为m1和m2 ,已知两球间存在大小相等、方向相反的斥力而使两线张开一定角度,分别为45和30°,如图15所示。则m1 : m2??为多少?
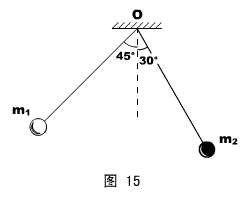
解说:本题考查正弦定理、或力矩平衡解静力学问题。
对两球进行受力分析,并进行矢量平移,如图16所示。
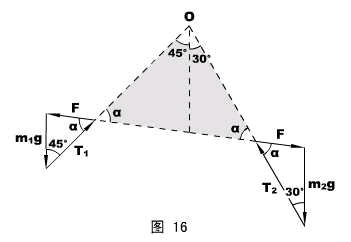
首先注意,图16中的灰色三角形是等腰三角形,两底角相等,设为α。
而且,两球相互作用的斥力方向相反,大小相等,可用同一字母表示,设为F 。
对左边的矢量三角形用正弦定理,有:
![]() =
= ![]() ①
①
同理,对右边的矢量三角形,有:![]() =
= ![]() ②
②
解①②两式即可。
答案:1 :![]() 。
。
(学生活动)思考:解本题是否还有其它的方法?
答:有——将模型看成用轻杆连成的两小球,而将O点看成转轴,两球的重力对O的力矩必然是平衡的。这种方法更直接、简便。
应用:若原题中绳长不等,而是l1 :l2 = 3 :2 ,其它条件不变,m1与m2的比值又将是多少?
解:此时用共点力平衡更加复杂(多一个正弦定理方程),而用力矩平衡则几乎和“思考”完全相同。
答:2 :3![]() 。
。
5、如图17所示,一个半径为R的均质金属球上固定着一根长为L的轻质细杆,细杆的左端用铰链与墙壁相连,球下边垫上一块木板后,细杆恰好水平,而木板下面是光滑的水平面。由于金属球和木板之间有摩擦(已知摩擦因素为μ),所以要将木板从球下面向右抽出时,至少需要大小为F的水平拉力。试问:现要将木板继续向左插进一些,至少需要多大的水平推力?
解说:这是一个典型的力矩平衡的例题。
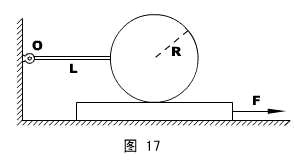
以球和杆为对象,研究其对转轴O的转动平衡,设木板拉出时给球体的摩擦力为f ,支持力为N ,重力为G ,力矩平衡方程为:
f R + N(R + L)= G(R + L) ①
球和板已相对滑动,故:f = μN ②
解①②可得:f = ![]()
再看木板的平衡,F = f 。
同理,木板插进去时,球体和木板之间的摩擦f′= ![]() = F′。
= F′。
答案:![]() 。
。
第四讲 摩擦角及其它
一、摩擦角
1、全反力:接触面给物体的摩擦力与支持力的合力称全反力,一般用R表示,亦称接触反力。
2、摩擦角:全反力与支持力的最大夹角称摩擦角,一般用φm表示。
此时,要么物体已经滑动,必有:φm = arctgμ(μ为动摩擦因素),称动摩擦力角;要么物体达到最大运动趋势,必有:φms = arctgμs(μs为静摩擦因素),称静摩擦角。通常处理为φm = φms 。
3、引入全反力和摩擦角的意义:使分析处理物体受力时更方便、更简捷。
二、隔离法与整体法
1、隔离法:当物体对象有两个或两个以上时,有必要各个击破,逐个讲每个个体隔离开来分析处理,称隔离法。
在处理各隔离方程之间的联系时,应注意相互作用力的大小和方向关系。
2、整体法:当各个体均处于平衡状态时,我们可以不顾个体的差异而讲多个对象看成一个整体进行分析处理,称整体法。
应用整体法时应注意“系统”、“内力”和“外力”的涵义。
三、应用
1、物体放在水平面上,用与水平方向成30°的力拉物体时,物体匀速前进。若此力大小不变,改为沿水平方向拉物体,物体仍能匀速前进,求物体与水平面之间的动摩擦因素μ。
解说:这是一个能显示摩擦角解题优越性的题目。可以通过不同解法的比较让学生留下深刻印象。
法一,正交分解。(学生分析受力→列方程→得结果。)
法二,用摩擦角解题。
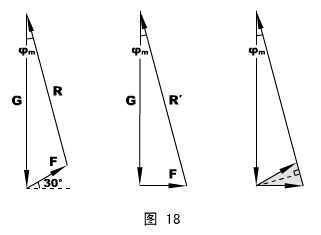
引进全反力R ,对物体两个平衡状态进行受力分析,再进行矢量平移,得到图18中的左图和中间图(注意:重力G是不变的,而全反力R的方向不变、F的大小不变),φm指摩擦角。
再将两图重叠成图18的右图。由于灰色的三角形是一个顶角为30°的等腰三角形,其顶角的角平分线必垂直底边……故有:φm = 15°。
最后,μ= tgφm 。
答案:0.268 。
(学生活动)思考:如果F的大小是可以选择的,那么能维持物体匀速前进的最小F值是多少?
解:见图18,右图中虚线的长度即Fmin ,所以,Fmin = Gsinφm 。
答:Gsin15°(其中G为物体的重量)。
2、如图19所示,质量m = 5kg的物体置于一粗糙斜面上,并用一平行斜面的、大小F = 30N的推力推物体,使物体能够沿斜面向上匀速运动,而斜面体始终静止。已知斜面的质量M = 10kg ,倾角为30°,重力加速度g = 10m/s2 ,求地面对斜面体的摩擦力大小。
解说:
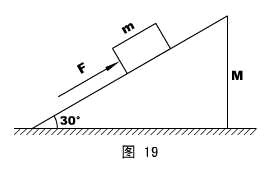
本题旨在显示整体法的解题的优越性。
法一,隔离法。简要介绍……
法二,整体法。注意,滑块和斜面随有相对运动,但从平衡的角度看,它们是完全等价的,可以看成一个整体。
做整体的受力分析时,内力不加考虑。受力分析比较简单,列水平方向平衡方程很容易解地面摩擦力。
答案:26.0N 。
(学生活动)地面给斜面体的支持力是多少?
解:略。
答:135N 。
应用:如图20所示,一上表面粗糙的斜面体上放在光滑的水平地面上,斜面的倾角为θ。另一质量为m的滑块恰好能沿斜面匀速下滑。若用一推力F作用在滑块上,使之能沿斜面匀速上滑,且要求斜面体静止不动,就必须施加一个大小为P = 4mgsinθcosθ的水平推力作用于斜面体。使满足题意的这个F的大小和方向。
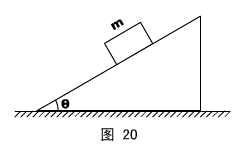
解说:这是一道难度较大的静力学题,可以动用一切可能的工具解题。
法一:隔离法。
由第一个物理情景易得,斜面于滑块的摩擦因素μ= tgθ
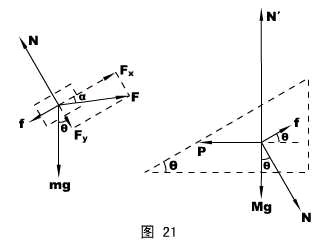
对第二个物理情景,分别隔离滑块和斜面体分析受力,并将F沿斜面、垂直斜面分解成Fx和Fy ,滑块与斜面之间的两对相互作用力只用两个字母表示(N表示正压力和弹力,f表示摩擦力),如图21所示。
对滑块,我们可以考查沿斜面方向和垂直斜面方向的平衡——
Fx = f + mgsinθ
Fy + mgcosθ= N
且 f = μN = Ntgθ
综合以上三式得到:
Fx = Fytgθ+ 2mgsinθ ①
对斜面体,只看水平方向平衡就行了——
P = fcosθ+ Nsinθ
即:4mgsinθcosθ=μNcosθ+ Nsinθ
代入μ值,化简得:Fy = mgcosθ ②
②代入①可得:Fx = 3mgsinθ
最后由F =![]() 解F的大小,由tgα=
解F的大小,由tgα= ![]() 解F的方向(设α为F和斜面的夹角)。
解F的方向(设α为F和斜面的夹角)。
答案:大小为F = mg![]() ,方向和斜面夹角α= arctg(
,方向和斜面夹角α= arctg(![]() )指向斜面内部。
)指向斜面内部。
法二:引入摩擦角和整体法观念。
仍然沿用“法一”中关于F的方向设置(见图21中的α角)。
先看整体的水平方向平衡,有:Fcos(θ- α) = P ⑴
再隔离滑块,分析受力时引进全反力R和摩擦角φ,由于简化后只有三个力(R、mg和F),可以将矢量平移后构成一个三角形,如图22所示。
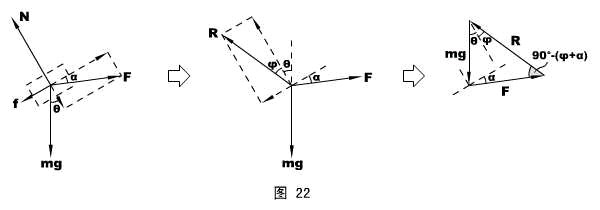
在图22右边的矢量三角形中,有:![]() =
= ![]() =
= ![]() ⑵
⑵
注意:φ= arctgμ= arctg(tgθ) = θ ⑶
解⑴⑵⑶式可得F和α的值。
查看习题详情和答案>>第十部分 磁场
第一讲 基本知识介绍
《磁场》部分在奥赛考刚中的考点很少,和高考要求的区别不是很大,只是在两处有深化:a、电流的磁场引进定量计算;b、对带电粒子在复合场中的运动进行了更深入的分析。
一、磁场与安培力
1、磁场
a、永磁体、电流磁场→磁现象的电本质
b、磁感强度、磁通量
c、稳恒电流的磁场
*毕奥-萨伐尔定律(Biot-Savart law):对于电流强度为I 、长度为dI的导体元段,在距离为r的点激发的“元磁感应强度”为dB 。矢量式d![]() = k
= k![]() ,(d
,(d![]() 表示导体元段的方向沿电流的方向、
表示导体元段的方向沿电流的方向、![]() 为导体元段到考查点的方向矢量);或用大小关系式dB = k
为导体元段到考查点的方向矢量);或用大小关系式dB = k![]() 结合安培定则寻求方向亦可。其中 k = 1.0×10?7N/A2 。应用毕萨定律再结合矢量叠加原理,可以求解任何形状导线在任何位置激发的磁感强度。
结合安培定则寻求方向亦可。其中 k = 1.0×10?7N/A2 。应用毕萨定律再结合矢量叠加原理,可以求解任何形状导线在任何位置激发的磁感强度。
毕萨定律应用在“无限长”直导线的结论:B = 2k![]() ;
;
*毕萨定律应用在环形电流垂直中心轴线上的结论:B = 2πkI![]() ;
;
*毕萨定律应用在“无限长”螺线管内部的结论:B = 2πknI 。其中n为单位长度螺线管的匝数。
2、安培力
a、对直导体,矢量式为 ![]() = I
= I![]() ;或表达为大小关系式 F = BILsinθ再结合“左手定则”解决方向问题(θ为B与L的夹角)。
;或表达为大小关系式 F = BILsinθ再结合“左手定则”解决方向问题(θ为B与L的夹角)。
b、弯曲导体的安培力
⑴整体合力
折线导体所受安培力的合力等于连接始末端连线导体(电流不变)的的安培力。
证明:参照图9-1,令MN段导体的安培力F1与NO段导体的安培力F2的合力为F,则F的大小为
F = ![]()
= BI![]()
= BI![]()
关于F的方向,由于ΔFF2P∽ΔMNO,可以证明图9-1中的两个灰色三角形相似,这也就证明了F是垂直MO的,再由于ΔPMO是等腰三角形(这个证明很容易),故F在MO上的垂足就是MO的中点了。
证毕。
由于连续弯曲的导体可以看成是无穷多元段直线导体的折合,所以,关于折线导体整体合力的结论也适用于弯曲导体。(说明:这个结论只适用于匀强磁场。)
⑵导体的内张力
弯曲导体在平衡或加速的情形下,均会出现内张力,具体分析时,可将导体在被考查点切断,再将被切断的某一部分隔离,列平衡方程或动力学方程求解。
c、匀强磁场对线圈的转矩
如图9-2所示,当一个矩形线圈(线圈面积为S、通以恒定电流I)放入匀强磁场中,且磁场B的方向平行线圈平面时,线圈受安培力将转动(并自动选择垂直B的中心轴OO′,因为质心无加速度),此瞬时的力矩为
M = BIS
几种情形的讨论——
⑴增加匝数至N ,则 M = NBIS ;
⑵转轴平移,结论不变(证明从略);
⑶线圈形状改变,结论不变(证明从略);

*⑷磁场平行线圈平面相对原磁场方向旋转α角,则M = BIScosα ,如图9-3;
证明:当α = 90°时,显然M = 0 ,而磁场是可以分解的,只有垂直转轴的的分量Bcosα才能产生力矩…
⑸磁场B垂直OO′轴相对线圈平面旋转β角,则M = BIScosβ ,如图9-4。
证明:当β = 90°时,显然M = 0 ,而磁场是可以分解的,只有平行线圈平面的的分量Bcosβ才能产生力矩…
说明:在默认的情况下,讨论线圈的转矩时,认为线圈的转轴垂直磁场。如果没有人为设定,而是让安培力自行选定转轴,这时的力矩称为力偶矩。
二、洛仑兹力
1、概念与规律
a、![]() = q
= q![]() ,或展开为f = qvBsinθ再结合左、右手定则确定方向(其中θ为
,或展开为f = qvBsinθ再结合左、右手定则确定方向(其中θ为![]() 与
与![]() 的夹角)。安培力是大量带电粒子所受洛仑兹力的宏观体现。
的夹角)。安培力是大量带电粒子所受洛仑兹力的宏观体现。
b、能量性质
由于![]() 总垂直
总垂直![]() 与
与![]() 确定的平面,故
确定的平面,故![]() 总垂直
总垂直![]() ,只能起到改变速度方向的作用。结论:洛仑兹力可对带电粒子形成冲量,却不可能做功。或:洛仑兹力可使带电粒子的动量发生改变却不能使其动能发生改变。
,只能起到改变速度方向的作用。结论:洛仑兹力可对带电粒子形成冲量,却不可能做功。或:洛仑兹力可使带电粒子的动量发生改变却不能使其动能发生改变。
问题:安培力可以做功,为什么洛仑兹力不能做功?
解说:应该注意“安培力是大量带电粒子所受洛仑兹力的宏观体现”这句话的确切含义——“宏观体现”和“完全相等”是有区别的。我们可以分两种情形看这个问题:(1)导体静止时,所有粒子的洛仑兹力的合力等于安培力(这个证明从略);(2)导体运动时,粒子参与的是沿导体棒的运动v1和导体运动v2的合运动,其合速度为v ,这时的洛仑兹力f垂直v而安培力垂直导体棒,它们是不可能相等的,只能说安培力是洛仑兹力的分力f1 = qv1B的合力(见图9-5)。

很显然,f1的合力(安培力)做正功,而f不做功(或者说f1的正功和f2的负功的代数和为零)。(事实上,由于电子定向移动速率v1在10?5m/s数量级,而v2一般都在10?2m/s数量级以上,致使f1只是f的一个极小分量。)
☆如果从能量的角度看这个问题,当导体棒放在光滑的导轨上时(参看图9-6),导体棒必获得动能,这个动能是怎么转化来的呢?
若先将导体棒卡住,回路中形成稳恒的电流,电流的功转化为回路的焦耳热。而将导体棒释放后,导体棒受安培力加速,将形成感应电动势(反电动势)。动力学分析可知,导体棒的最后稳定状态是匀速运动(感应电动势等于电源电动势,回路电流为零)。由于达到稳定速度前的回路电流是逐渐减小的,故在相同时间内发的焦耳热将比导体棒被卡住时少。所以,导体棒动能的增加是以回路焦耳热的减少为代价的。
2、仅受洛仑兹力的带电粒子运动
a、![]() ⊥
⊥![]() 时,匀速圆周运动,半径r =
时,匀速圆周运动,半径r = ![]() ,周期T =
,周期T = ![]()
b、![]() 与
与![]() 成一般夹角θ时,做等螺距螺旋运动,半径r =
成一般夹角θ时,做等螺距螺旋运动,半径r = ![]() ,螺距d =
,螺距d = ![]()
这个结论的证明一般是将![]() 分解…(过程从略)。
分解…(过程从略)。
☆但也有一个问题,如果将![]() 分解(成垂直速度分量B2和平行速度分量B1 ,如图9-7所示),粒子的运动情形似乎就不一样了——在垂直B2的平面内做圆周运动?
分解(成垂直速度分量B2和平行速度分量B1 ,如图9-7所示),粒子的运动情形似乎就不一样了——在垂直B2的平面内做圆周运动?
其实,在图9-7中,B1平行v只是一种暂时的现象,一旦受B2的洛仑兹力作用,v改变方向后就不再平行B1了。当B1施加了洛仑兹力后,粒子的“圆周运动”就无法达成了。(而在分解v的处理中,这种局面是不会出现的。)
3、磁聚焦
a、结构:见图9-8,K和G分别为阴极和控制极,A为阳极加共轴限制膜片,螺线管提供匀强磁场。
b、原理:由于控制极和共轴膜片的存在,电子进磁场的发散角极小,即速度和磁场的夹角θ极小,各粒子做螺旋运动时可以认为螺距彼此相等(半径可以不等),故所有粒子会“聚焦”在荧光屏上的P点。
4、回旋加速器
a、结构&原理(注意加速时间应忽略)
b、磁场与交变电场频率的关系
因回旋周期T和交变电场周期T′必相等,故 ![]() =
=![]()
c、最大速度 vmax = ![]() = 2πRf
= 2πRf
5、质谱仪
速度选择器&粒子圆周运动,和高考要求相同。
第二讲 典型例题解析
一、磁场与安培力的计算
【例题1】两根无限长的平行直导线a、b相距40cm,通过电流的大小都是3.0A,方向相反。试求位于两根导线之间且在两导线所在平面内的、与a导线相距10cm的P点的磁感强度。
【解说】这是一个关于毕萨定律的简单应用。解题过程从略。
【答案】大小为8.0×10?6T ,方向在图9-9中垂直纸面向外。
【例题2】半径为R ,通有电流I的圆形线圈,放在磁感强度大小为B 、方向垂直线圈平面的匀强磁场中,求由于安培力而引起的线圈内张力。
【解说】本题有两种解法。
方法一:隔离一小段弧,对应圆心角θ ,则弧长L = θR 。因为θ →
查看习题详情和答案>>第六部分 振动和波
第一讲 基本知识介绍
《振动和波》的竞赛考纲和高考要求有很大的不同,必须做一些相对详细的补充。
一、简谐运动
1、简谐运动定义:![]() = -k
= -k![]() ①
①

凡是所受合力和位移满足①式的质点,均可称之为谐振子,如弹簧振子、小角度单摆等。
谐振子的加速度:![]() = -
= -![]()
![]()
2、简谐运动的方程
回避高等数学工具,我们可以将简谐运动看成匀速圆周运动在某一条直线上的投影运动(以下均看在x方向的投影),圆周运动的半径即为简谐运动的振幅A 。
依据:![]() x = -mω2Acosθ= -mω2
x = -mω2Acosθ= -mω2![]()
对于一个给定的匀速圆周运动,m、ω是恒定不变的,可以令:
mω2 = k
这样,以上两式就符合了简谐运动的定义式①。所以,x方向的位移、速度、加速度就是简谐运动的相关规律。从图1不难得出——
位移方程:![]() = Acos(ωt + φ) ②
= Acos(ωt + φ) ②
速度方程:![]() = -ωAsin(ωt +φ) ③
= -ωAsin(ωt +φ) ③
加速度方程:![]() = -ω2A cos(ωt +φ) ④
= -ω2A cos(ωt +φ) ④
相关名词:(ωt +φ)称相位,φ称初相。
运动学参量的相互关系:![]() = -ω2
= -ω2![]()
A = ![]()
tgφ= -![]()
3、简谐运动的合成
a、同方向、同频率振动合成。两个振动x1 = A1cos(ωt +φ1)和x2 = A2cos(ωt +φ2) 合成,可令合振动x = Acos(ωt +φ) ,由于x = x1 + x2 ,解得
A = ![]() ,φ= arctg
,φ= arctg ![]()
显然,当φ2-φ1 = 2kπ时(k = 0,±1,±2,…),合振幅A最大,当φ2-φ1 = (2k + 1)π时(k = 0,±1,±2,…),合振幅最小。
b、方向垂直、同频率振动合成。当质点同时参与两个垂直的振动x = A1cos(ωt + φ1)和y = A2cos(ωt + φ2)时,这两个振动方程事实上已经构成了质点在二维空间运动的轨迹参数方程,消去参数t后,得一般形式的轨迹方程为
![]() +
+![]() -2
-2![]() cos(φ2-φ1) = sin2(φ2-φ1)
cos(φ2-φ1) = sin2(φ2-φ1)
显然,当φ2-φ1 = 2kπ时(k = 0,±1,±2,…),有y = ![]() x ,轨迹为直线,合运动仍为简谐运动;
x ,轨迹为直线,合运动仍为简谐运动;
当φ2-φ1 = (2k + 1)π时(k = 0,±1,±2,…),有![]() +
+![]() = 1 ,轨迹为椭圆,合运动不再是简谐运动;
= 1 ,轨迹为椭圆,合运动不再是简谐运动;
当φ2-φ1取其它值,轨迹将更为复杂,称“李萨如图形”,不是简谐运动。
c、同方向、同振幅、频率相近的振动合成。令x1 = Acos(ω1t + φ)和x2 = Acos(ω2t + φ) ,由于合运动x = x1 + x2 ,得:x =(2Acos![]() t)cos(
t)cos(![]() t +φ)。合运动是振动,但不是简谐运动,称为角频率为
t +φ)。合运动是振动,但不是简谐运动,称为角频率为![]() 的“拍”现象。
的“拍”现象。
4、简谐运动的周期
由②式得:ω= ![]() ,而圆周运动的角速度和简谐运动的角频率是一致的,所以
,而圆周运动的角速度和简谐运动的角频率是一致的,所以
T = 2π![]() ⑤
⑤
5、简谐运动的能量
一个做简谐运动的振子的能量由动能和势能构成,即
![]() =
= ![]() mv2 +
mv2 + ![]() kx2 =
kx2 = ![]() kA2
kA2
注意:振子的势能是由(回复力系数)k和(相对平衡位置位移)x决定的一个抽象的概念,而不是具体地指重力势能或弹性势能。当我们计量了振子的抽象势能后,其它的具体势能不能再做重复计量。
6、阻尼振动、受迫振动和共振
和高考要求基本相同。
二、机械波
1、波的产生和传播
产生的过程和条件;传播的性质,相关参量(决定参量的物理因素)
2、机械波的描述
a、波动图象。和振动图象的联系
b、波动方程
如果一列简谐波沿x方向传播,振源的振动方程为y = Acos(ωt + φ),波的传播速度为v ,那么在离振源x处一个振动质点的振动方程便是
y = Acos〔ωt + φ - ![]() ·2π〕= Acos〔ω(t -
·2π〕= Acos〔ω(t - ![]() )+ φ〕
)+ φ〕
这个方程展示的是一个复变函数。对任意一个时刻t ,都有一个y(x)的正弦函数,在x-y坐标下可以描绘出一个瞬时波形。所以,称y = Acos〔ω(t - ![]() )+ φ〕为波动方程。
)+ φ〕为波动方程。
3、波的干涉
a、波的叠加。几列波在同一介质种传播时,能独立的维持它们的各自形态传播,在相遇的区域则遵从矢量叠加(包括位移、速度和加速度的叠加)。

b、波的干涉。两列波频率相同、相位差恒定时,在同一介质中的叠加将形成一种特殊形态:振动加强的区域和振动削弱的区域稳定分布且彼此隔开。
我们可以用波程差的方法来讨论干涉的定量规律。如图2所示,我们用S1和S2表示两个波源,P表示空间任意一点。
当振源的振动方向相同时,令振源S1的振动方程为y1 = A1cosωt ,振源S1的振动方程为y2 = A2cosωt ,则在空间P点(距S1为r1 ,距S2为r2),两振源引起的分振动分别是
y1′= A1cos〔ω(t ? ![]() )〕
)〕
y2′= A2cos〔ω(t ? ![]() )〕
)〕
P点便出现两个频率相同、初相不同的振动叠加问题(φ1 = ![]() ,φ2 =
,φ2 = ![]() ),且初相差Δφ=
),且初相差Δφ= ![]() (r2 – r1)。根据前面已经做过的讨论,有
(r2 – r1)。根据前面已经做过的讨论,有
r2 ? r1 = kλ时(k = 0,±1,±2,…),P点振动加强,振幅为A1 + A2 ;
r2 ? r1 =(2k ? 1)![]() 时(k = 0,±1,±2,…),P点振动削弱,振幅为│A1-A2│。
时(k = 0,±1,±2,…),P点振动削弱,振幅为│A1-A2│。
4、波的反射、折射和衍射
知识点和高考要求相同。
5、多普勒效应
当波源或者接受者相对与波的传播介质运动时,接收者会发现波的频率发生变化。多普勒效应的定量讨论可以分为以下三种情况(在讨论中注意:波源的发波频率f和波相对介质的传播速度v是恒定不变的)——
a、只有接收者相对介质运动(如图3所示)
设接收者以速度v1正对静止的波源运动。
如果接收者静止在A点,他单位时间接收的波的个数为f ,

当他迎着波源运动时,设其在单位时间到达B点,则![]() = v1 ,、
= v1 ,、
在从A运动到B的过程中,接收者事实上“提前”多接收到了n个波
n = ![]() =
= ![]() =
= ![]()
显然,在单位时间内,接收者接收到的总的波的数目为:f + n = ![]() f ,这就是接收者发现的频率f1 。即
f ,这就是接收者发现的频率f1 。即
f1 = ![]() f
f
显然,如果v1背离波源运动,只要将上式中的v1代入负值即可。如果v1的方向不是正对S ,只要将v1出正对的分量即可。
b、只有波源相对介质运动(如图4所示)
设波源以速度v2正对静止的接收者运动。

如果波源S不动,在单位时间内,接收者在A点应接收f个波,故S到A的距离:![]() = fλ
= fλ
在单位时间内,S运动至S′,即![]() = v2 。由于波源的运动,事实造成了S到A的f个波被压缩在了S′到A的空间里,波长将变短,新的波长
= v2 。由于波源的运动,事实造成了S到A的f个波被压缩在了S′到A的空间里,波长将变短,新的波长
λ′= ![]() =
= ![]() =
= ![]() =
= ![]()
而每个波在介质中的传播速度仍为v ,故“被压缩”的波(A接收到的波)的频率变为
f2 = ![]() =
= ![]() f
f
当v2背离接收者,或有一定夹角的讨论,类似a情形。
c、当接收者和波源均相对传播介质运动
当接收者正对波源以速度v1(相对介质速度)运动,波源也正对接收者以速度v2(相对介质速度)运动,我们的讨论可以在b情形的过程上延续…
![]() f3 =
f3 = ![]() f2 =
f2 = ![]() f
f
关于速度方向改变的问题,讨论类似a情形。
6、声波
a、乐音和噪音
b、声音的三要素:音调、响度和音品
c、声音的共鸣
第二讲 重要模型与专题
一、简谐运动的证明与周期计算

物理情形:如图5所示,将一粗细均匀、两边开口的U型管固定,其中装有一定量的水银,汞柱总长为L 。当水银受到一个初始的扰动后,开始在管中振动。忽略管壁对汞的阻力,试证明汞柱做简谐运动,并求其周期。
模型分析:对简谐运动的证明,只要以汞柱为对象,看它的回复力与位移关系是否满足定义式①,值得注意的是,回复力![]() 系指振动方向上的合力(而非整体合力)。当简谐运动被证明后,回复力系数k就有了,求周期就是顺理成章的事。
系指振动方向上的合力(而非整体合力)。当简谐运动被证明后,回复力系数k就有了,求周期就是顺理成章的事。
本题中,可设汞柱两端偏离平衡位置的瞬时位移为x 、水银密度为ρ、U型管横截面积为S ,则次瞬时的回复力
ΣF = ρg2xS = ![]() x
x
由于L、m为固定值,可令:![]() = k ,而且ΣF与x的方向相反,故汞柱做简谐运动。
= k ,而且ΣF与x的方向相反,故汞柱做简谐运动。
周期T = 2π![]() = 2π
= 2π![]()
答:汞柱的周期为2π![]() 。
。

学生活动:如图6所示,两个相同的柱形滚轮平行、登高、水平放置,绕各自的轴线等角速、反方向地转动,在滚轮上覆盖一块均质的木板。已知两滚轮轴线的距离为L 、滚轮与木板之间的动摩擦因素为μ、木板的质量为m ,且木板放置时,重心不在两滚轮的正中央。试证明木板做简谐运动,并求木板运动的周期。
思路提示:找平衡位置(木板重心在两滚轮中央处)→ú力矩平衡和Σ?F6= 0结合求两处弹力→ú求摩擦力合力…
答案:木板运动周期为2π![]() 。
。
巩固应用:如图7所示,三根长度均为L = 2.00m地质量均匀直杆,构成一正三角形框架ABC,C点悬挂在一光滑水平轴上,整个框架可绕转轴转动。杆AB是一导轨,一电动松鼠可在导轨上运动。现观察到松鼠正在导轨上运动,而框架却静止不动,试讨论松鼠的运动是一种什么样的运动。

解说:由于框架静止不动,松鼠在竖直方向必平衡,即:松鼠所受框架支持力等于松鼠重力。设松鼠的质量为m ,即:
N = mg ①
再回到框架,其静止平衡必满足框架所受合力矩为零。以C点为转轴,形成力矩的只有松鼠的压力N、和松鼠可能加速的静摩擦力f ,它们合力矩为零,即:
MN = Mf
现考查松鼠在框架上的某个一般位置(如图7,设它在导轨方向上距C点为x),上式即成:
N·x = f·Lsin60° ②
解①②两式可得:f = ![]() x ,且f的方向水平向左。
x ,且f的方向水平向左。
根据牛顿第三定律,这个力就是松鼠在导轨方向上的合力。如果我们以C在导轨上的投影点为参考点,x就是松鼠的瞬时位移。再考虑到合力与位移的方向因素,松鼠的合力与位移满足关系——
![]() = -k
= -k![]()
其中k = ![]() ,对于这个系统而言,k是固定不变的。
,对于这个系统而言,k是固定不变的。
显然这就是简谐运动的定义式。
答案:松鼠做简谐运动。
评说:这是第十三届物理奥赛预赛试题,问法比较模糊。如果理解为定性求解,以上答案已经足够。但考虑到原题中还是有定量的条件,所以做进一步的定量运算也是有必要的。譬如,我们可以求出松鼠的运动周期为:T = 2π![]() = 2π
= 2π![]() = 2.64s 。
= 2.64s 。
二、典型的简谐运动
1、弹簧振子

物理情形:如图8所示,用弹性系数为k的轻质弹簧连着一个质量为m的小球,置于倾角为θ
查看习题详情和答案>>