摘要:答案:B 12.答案:C
网址:http://m.1010jiajiao.com/timu_id_4415383[举报]
题号
1
2
3
4
5
6
7
8
9
答案
D
C
B
A
B
C
A
C
D
题号
10
11
12
13
14
15
16
答案
B
D
A
2000年10月31日凌晨0时2分、12月21日凌晨0时20分,两颗构成我国自主研制的“北斗导航系统”的导航定位卫星――北斗导航试验卫星,先后在西昌卫星发射中心发射升空,并准确进入预定轨道,标志着我国在全球定位系统(GlobalPositionSystem,简称GPS)技术领域进入了世界先进行列.
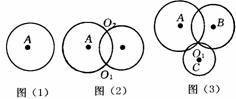
GPS的原理是采用“三点定位法”来定位的.下面我们以二维平面为例,来说明三点定位的原理,假若你到了一个陌生的地方,你可以通过测量出你到某已知地点A的距离a,则你现在就处在以A为圆心、以a为半径的圆周上,如上图(1)所示,如果再测量出你到另一个已知地点B的距b,则你也处在以B为圆心、以b为半径的圆周上,如上图(2)所示,由上图(2)可以看出,你现在的位置只可能是在两圆周的交点O1或O2上,若要惟一确定你的位置,就必须再通过测量出你到第三个已知地点C的距离c,你现在的位置也一定在以C为圆心、以c为半径的第三个圆周上,如上图(3)所示,三圆的交点O1就是你的位置,这就是说,三点定位法需要有三个坐标已知的参考点,并知道被测点到参考点之间的距离,在三维空间中,其定位原理基本与此相同,只是往往要加上一个已知条件:被测量点在地面上,在GPS中,三个参考点就是三颗悬在空中已知位置坐标的卫星,被测量点到它们的距离可以通过接收从卫星发来的无线电波测量出来,则被测点在地面上的位置可由地面接收装置中的电脑计算出来,GPS要由空间卫星系统、地面监控系统、用户接收系统三大部分构成,天上地下协同工作,才能完成定位.空间卫星系统也就是GPS导航卫星群,以俄罗斯“格拉纳斯”全球导航系统为例,按照设计方案,它是由24颗工作卫星组成,它们均匀分布在6个轨道平面上,每个轨道上均匀分布有4颗卫星,每颗卫星每12h绕地球运行一周,假设这些卫星都在离地面某一高度的轨道上做匀速圆周运动,取地球半径R=6400km,地面的重力加速度g=10m/s2.
根据以上信息,请回答下列问题:
①间谍卫星上装有某种遥感照相机,可用来探测军用和民用目标.这种照相机能拍到晚上关灯行驶的汽车,甚至车队已经离开,也瞒不过它.这种遥感照相机敏感的电磁波属于( )
A.可见光波段 B.红外波段
C.紫外波段 D.X波段
②下列有关GPS中卫星的加速度的说法中正确的是
A.因卫星做匀速圆周运动,其加速度为零
B.在卫星只受重力作用,其加速度为重力加速度g
C.若卫星距地面高度H为地球半径R的n倍,则其加速度为
D.若卫星距地面高度H为地球半径R的n倍,则其加速度为
③下列关于导航卫星群中卫星轨道的说法中,正确的是( )
①卫星的轨道平面都垂直于地轴
②卫星的轨道平面都过地心
③地球上除赤道以外的某条纬线可能处于某个卫星的轨道平面内
④地球上某条经线可能处于某个卫星的轨道平面内
A.①② B.②③ C.②④ D.③④
④“格拉纳斯”全球卫星导航系统的导航卫星群中除24颗工作卫星外,还有些替补卫星在天空运行,当某颗工作卫星出现故障时可及时顶替工作,若某颗替补卫星处在略低于工作卫星的轨道上,则这颗卫星的周期和速度与工作卫星相比较,以下说法正确的是( )
A.替补卫星的周期大于工作卫星的周期,速度大于工作卫星的速度
B.替补卫星的周期小于工作卫星的周期,速度大于工作卫星的速度
C.替补卫星的周期大于工作卫星的周期,速度小于工作卫星的速度
D.替补卫星的周期小于工作卫星的周期,速度小于工作卫星的速度
查看习题详情和答案>>
GPS的原理是采用“三点定位法”来定位的.下面我们以二维平面为例,来说明三点定位的原理,假若你到了一个陌生的地方,你可以通过测量出你到某已知地点A的距离a,则你现在就处在以A为圆心、以a为半径的圆周上,如上图(1)所示,如果再测量出你到另一个已知地点B的距b,则你也处在以B为圆心、以b为半径的圆周上,如上图(2)所示,由上图(2)可以看出,你现在的位置只可能是在两圆周的交点O1或O2上,若要惟一确定你的位置,就必须再通过测量出你到第三个已知地点C的距离c,你现在的位置也一定在以C为圆心、以c为半径的第三个圆周上,如上图(3)所示,三圆的交点O1就是你的位置,这就是说,三点定位法需要有三个坐标已知的参考点,并知道被测点到参考点之间的距离,在三维空间中,其定位原理基本与此相同,只是往往要加上一个已知条件:被测量点在地面上,在GPS中,三个参考点就是三颗悬在空中已知位置坐标的卫星,被测量点到它们的距离可以通过接收从卫星发来的无线电波测量出来,则被测点在地面上的位置可由地面接收装置中的电脑计算出来,GPS要由空间卫星系统、地面监控系统、用户接收系统三大部分构成,天上地下协同工作,才能完成定位.空间卫星系统也就是GPS导航卫星群,以俄罗斯“格拉纳斯”全球导航系统为例,按照设计方案,它是由24颗工作卫星组成,它们均匀分布在6个轨道平面上,每个轨道上均匀分布有4颗卫星,每颗卫星每12h绕地球运行一周,假设这些卫星都在离地面某一高度的轨道上做匀速圆周运动,取地球半径R=6400km,地面的重力加速度g=10m/s2.
根据以上信息,请回答下列问题:
①间谍卫星上装有某种遥感照相机,可用来探测军用和民用目标.这种照相机能拍到晚上关灯行驶的汽车,甚至车队已经离开,也瞒不过它.这种遥感照相机敏感的电磁波属于( )
A.可见光波段 B.红外波段
C.紫外波段 D.X波段
②下列有关GPS中卫星的加速度的说法中正确的是
A.因卫星做匀速圆周运动,其加速度为零
B.在卫星只受重力作用,其加速度为重力加速度g
C.若卫星距地面高度H为地球半径R的n倍,则其加速度为
D.若卫星距地面高度H为地球半径R的n倍,则其加速度为
③下列关于导航卫星群中卫星轨道的说法中,正确的是( )
①卫星的轨道平面都垂直于地轴
②卫星的轨道平面都过地心
③地球上除赤道以外的某条纬线可能处于某个卫星的轨道平面内
④地球上某条经线可能处于某个卫星的轨道平面内
A.①② B.②③ C.②④ D.③④
④“格拉纳斯”全球卫星导航系统的导航卫星群中除24颗工作卫星外,还有些替补卫星在天空运行,当某颗工作卫星出现故障时可及时顶替工作,若某颗替补卫星处在略低于工作卫星的轨道上,则这颗卫星的周期和速度与工作卫星相比较,以下说法正确的是( )
A.替补卫星的周期大于工作卫星的周期,速度大于工作卫星的速度
B.替补卫星的周期小于工作卫星的周期,速度大于工作卫星的速度
C.替补卫星的周期大于工作卫星的周期,速度小于工作卫星的速度
D.替补卫星的周期小于工作卫星的周期,速度小于工作卫星的速度
查看习题详情和答案>>
【物理-物理3-3】
(1)将你认为正确的答案标号填在后面的横线上___________
A.液体表面层中分子间的距离比液体内部分子间的距离大
B.第二类永动机是不可能制成的,因为它违背了能的转化和守恒定律
C.当分子间的距离减小时,分子间作用力的合力也减小,分子势能增大
 D.有些晶体在一定的条件下可以转化为非晶体
D.有些晶体在一定的条件下可以转化为非晶体
(2)右图为一高压锅的示意图,锅盖上有一限压阀,当锅内气体的压强大于某一值时,限压阀被顶起,气体外泄。已知限压阀的重量为0.7N,泄气孔的横截面积![]() 。下表为水的沸点与外界压强的关系。
。下表为水的沸点与外界压强的关系。
| 压强( | 1.01 | 1.43 | 1.54 | 1.63 | 1.73 | 1.82 | 1.91 | 2.01 | 2.12 | 2.21 |
| 水的沸点 | 100 | 110 | 112 | 114 | 116 | 118 | 120 | 122 | 124 | 126 |
试求:

 Ⅰ.某同学在做测定木块与木板间动摩擦因数的实验过程中,测滑动摩擦力时,他设计了两种实验方案.
Ⅰ.某同学在做测定木块与木板间动摩擦因数的实验过程中,测滑动摩擦力时,他设计了两种实验方案.方案一:木板固定在水平面上,用弹簧测力计水平拉动木块,如图甲所示.
方案二:用弹簧测力计水平地钩住木块,用力使木板在水平面上运动,如图乙所示.

除了实验必需的弹簧测力计、木块、木板、细线外,该同学还准备了若干重均为2.00N的砝码.
(1)上述两种方案中,你认为更合理的方案是
乙
乙
(填“甲”或“乙”),理由是:(回答一个理由即可)图乙中固定弹簧测力计,拉动木板做相对运动,更容易控制拉动的速度,使示数更稳定,测量更准确
图乙中固定弹簧测力计,拉动木板做相对运动,更容易控制拉动的速度,使示数更稳定,测量更准确
.(2)该同学在木块上加砝码,改变木块对木板的压力,记录了5组实验数据,如下表所示.
| 实验次序 | 1 | 2 | 3 | 4 | 5 |
| 砝码个数 | 0 | 1 | 2 | 3 | 4 |
| 砝码对木块 的压力/N |
0 | 2.00 | 4.00 | 6.00 | 8.00 |
| 测力计示 数/N |
1.50 | 2.00 | 2.50 | 2.95 | 3.50 |
| 木块受到的 摩擦力/N |
1.50 | 2.00 | 2.50 | 2.95 | 3.50 |
6.00
6.00
N;木块与木板间的动摩擦因数为0.25
0.25
.Ⅱ.某实验小组利用如图甲所示的实验装置来验证钩码和滑块所组成的系统由静止释放后机械能是否守恒.实验前已经调整气垫导轨底座使之水平,且选定滑块从静止开始运动的过程进行测量.
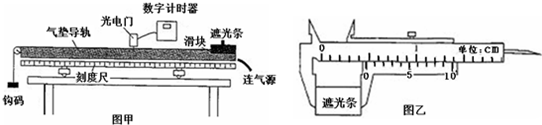
(1)如图乙所示,用游标卡尺测得窄遮光条的宽度d=
0.48
0.48
cm;实验时将滑块从图示位置由静止释放,由数字计时器读出遮光条通过光电门的时间△t=1.2×10-2s,则在遮光条经过光电门时滑块的瞬间速度为0.40
0.40
m/s.(2)已知当地重力加速度为g,钩码的质量为m,滑块的质量为M,在本实验中还需要直接测量的物理量有:
B
B
.A.光电门到导轨左端定滑轮的距离x
B.滑块上的遮光条初始位置到光电门的距离s
C.气垫导轨的总长L
(3)本实验通过比较
mgs
mgs
和| 1 |
| 2 |
| d |
| △t |
(4)为提高实验结果的准确程度,该实验小组的同学对此实验提出以下建议,其中确实对提高准确程度有作用的是
A
A
.A.绳的质量要轻,滑轮的质量要轻
B.在“轻质绳”的前提下,绳越长越好
C.钩码的质量m越小越好
(5)你还有其他好的建议是
摩擦力做功对实验有影响,减小摩擦力能提供精确度.
摩擦力做功对实验有影响,减小摩擦力能提供精确度.
. I.有同学利用如图所示的装置来验证力的平行四边形定则:在竖直木板上铺有白纸,固定两个光滑的滑轮A和B,将绳子打一个结点O,每个钩码的质量相等,当系统达到平衡-时,根据钩码个数读出三根绳子的拉力TOA、TOB和TOC,回答下列问题:
I.有同学利用如图所示的装置来验证力的平行四边形定则:在竖直木板上铺有白纸,固定两个光滑的滑轮A和B,将绳子打一个结点O,每个钩码的质量相等,当系统达到平衡-时,根据钩码个数读出三根绳子的拉力TOA、TOB和TOC,回答下列问题:(1)改变钩码个数,实验能完成的是
A.钩码的个数N1=N2=2,N3=4
B.钩码的个数N1=N3=3,N2=4
C.钩码的个数N1=N2=N3=4
D.钩码的个数N1=3,N2=4,N3=5
(2)在拆下钩码和绳子前,应该做好三个方面的记录:
II.有两组同学进行了如下实验:
(1)甲组同学器材有:电源,滑动变阻器,电流表A1(0-200mA,内阻约11Ω),电流表A2(0-300mA,内阻约8Ω,定值电阻R1=24Ω,R2=12Ω,开关一个,导线若干.为了测量A1的内阻,该组同学共设计了下图中A、B、C、D四套方案:

其中最佳的方案是
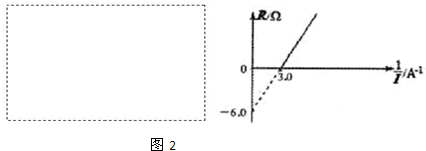
(2)乙组同学将甲组同学的电流表A1拿过来,再加上电阻箱R(最大阻值9.9Ω),定值电阻R0=6.0Ω,一个开关和若干导线用来测量一个电源(电动势E约为6.2V,内阻r约为2.1Ω)的电动势及内阻.请在图2方框中画出设计电路图.
若记录实验中电阻箱的阻值R和对应的A1示数的倒数
| 1 |
| I |
| 1 |
| I |