摘要:Ⅱ.要测定一块电流表A的内阻(量程0-5mA.内阻r约为500Ω).某同学在实验室找到了如下器材:电源E电压表V
网址:http://m.1010jiajiao.com/timu_id_414549[举报]
有一块电流表G,表盘上标度为“0~300”,没有注明单位,内阻约500Ω.实验小组想将该电流表改装成电压表,另从实验室找到下列可用器材:△
A.电压表V(量程0~30mV,内阻约1 kΩ);
B.电阻箱Ra(0~99999.9Ω);
C.电阻箱Rb两只(0~999.9Ω);
D.电源E(电动势为1.5V,内阻未知);
E.开关S两只,导线若干.
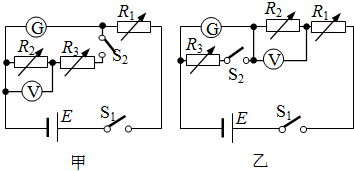
①实验小组想在测定电流表内阻rg的同时,能根据实验数据分析确定电流表的标度单位,于是设计了如图所示甲、乙两种实验电路,经小组试验,两种电路都能正常进行实验测量.为了尽量减小实验误差,你认为应该选择电路 进行实验;
②根据你选择的电路,应该由 与 来分析确定电流表的标度单位,估算表达式为 ;
③根据你选择的电路,分析产生实验误差的主要原因是
A.电源的内阻
B.电源的电动势的大小
C.电压表内阻
D.电阻箱R1阻值的大小
E.电阻箱R2阻值的精确度.
查看习题详情和答案>>
A.电压表V(量程0~30mV,内阻约1 kΩ);
B.电阻箱Ra(0~99999.9Ω);
C.电阻箱Rb两只(0~999.9Ω);
D.电源E(电动势为1.5V,内阻未知);
E.开关S两只,导线若干.
①实验小组想在测定电流表内阻rg的同时,能根据实验数据分析确定电流表的标度单位,于是设计了如图所示甲、乙两种实验电路,经小组试验,两种电路都能正常进行实验测量.为了尽量减小实验误差,你认为应该选择电路
②根据你选择的电路,应该由
③根据你选择的电路,分析产生实验误差的主要原因是
A.电源的内阻
B.电源的电动势的大小
C.电压表内阻
D.电阻箱R1阻值的大小
E.电阻箱R2阻值的精确度.
测量某一电流表A的内阻r1,给定器材有:
A.待测电流表A(量程300μA,内阻r1约为100 Ω)
B.电压表V(量程3V,内阻r2=1 kΩ)
C.电源E(电动势4V,内阻忽略不计)
D.定值电阻R1=10 Ω
E.滑动变阻器R2(阻值范围0~20 Ω,允许通过的最大电流0.5 A)
F.开关S一个,导线若干,要求测量时两块电表指针的偏转均超过其量程的一半。
(1)在方框中画出测量电路原理图。
(2)电路接通后,测得电压表读数为U,电流表读数为I,用已知和测得的物理量表示电流表内阻r1=____。
A.待测电流表A(量程300μA,内阻r1约为100 Ω)
B.电压表V(量程3V,内阻r2=1 kΩ)
C.电源E(电动势4V,内阻忽略不计)
D.定值电阻R1=10 Ω
E.滑动变阻器R2(阻值范围0~20 Ω,允许通过的最大电流0.5 A)
F.开关S一个,导线若干,要求测量时两块电表指针的偏转均超过其量程的一半。
(1)在方框中画出测量电路原理图。
(2)电路接通后,测得电压表读数为U,电流表读数为I,用已知和测得的物理量表示电流表内阻r1=____。
为了测量某一电流表A的内阻r1,给定的器材有:
器材 | 规格 |
待测电流表A | 量程300 μA,内阻r1约为100 Ω |
电压表V | 量程3 V,内阻r2=1 kΩ |
定值电阻R1 | 阻值为10 Ω |
滑动变阻器R2 | 阻值0—20 Ω,允许通过的最大电流0.5 A |
电源E | 电动势4 V,内阻不计 |
电键一只,导线若干 |
|
要求测量时两块电表的指针偏转均超过其量程的一半。
(1)在方框中画出测量电路原理图:
|
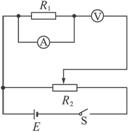
(2)电路接通后,测得电压表的读数为U,电流表的读数为I,用已知和测得的物理量的符号表示电流表的内阻r1=_________________________。
查看习题详情和答案>> (1)为测定一节干电池的电动势和内阻,用如图所示电路.
(1)为测定一节干电池的电动势和内阻,用如图所示电路.除干电池、开关、导线外可供使用的实验器材还有:
A.电流表(量程0.6A3A)
B.电压表(量程3V15V)
C.滑动变阻器(阻值范围0~10Ω额定电流2A)
D.滑动变阻器(阻值范围0~200Ω额定电流1A)
①请你完成下面的选择:电流表量程选
电压表量程选
(填器材前面的字母代号)
②在图中用笔画线代替导线完成实物连线;

(2)某学习小组利用气垫导轨验证机械能守恒定律,实验装置如图甲所示.在气垫导轨上相隔一定距离的两处安装两个光电传感器A、B,滑块P上固定一遮光条,若光线被遮光条遮挡,光电传感器会输出高电压,两光电传感器采集数据后与计算机相连.滑块在细线的牵引下向左加速运动,遮光条经过光电传感器A、B时,通过计算机可以得到如图乙所示的电压U随时间t变化的图象.

①实验前,接通气源,将滑块(不挂钩码)置于气垫导轨上,轻推滑块,当图乙中的
△t1
②用螺旋测微器测遮光条宽度d,测量结果如图丙所示,则d=
③滑块P用细线跨过气垫导轨的定滑轮与质量为m的钩码Q相连,将滑块P由图甲所示位置释放,通过计算机得到的图象如图乙所示,若△t1、△t2和d已知,要验证滑块和钩码组成的系统机械能是否守恒,还应测出
④若上述物理量间满足关系式