网址:http://m.1010jiajiao.com/timu_id_1100574[举报]
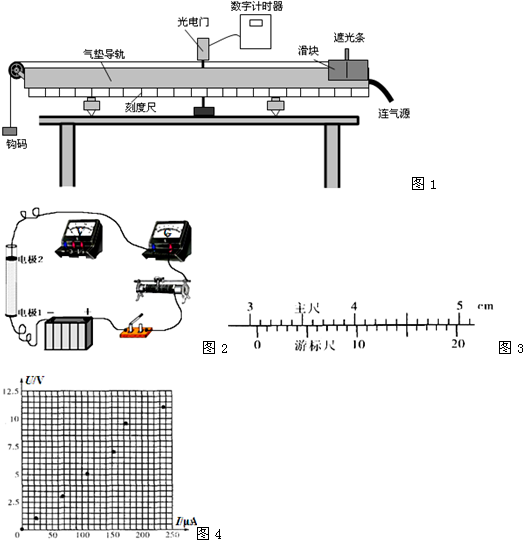
①请完善以下实验步骤:
a.用游标卡尺测遮光条的宽度,多次测量取平均值L;
b.实验时,先接通气源,再调节气垫导轨,使导轨处于水平位置;
c.将滑块从图示位置由静止释放,读出遮光条通过光电门的时间△t;
d.计算出滑块通过光电门的速度v=
②实验中还需要测量的物理量有:钩码的质量m、
③本实验通过比较
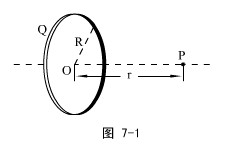
(2)某同学想测量某导电溶液的电阻率,先在一根均匀的长玻璃管两端各装了一个电极(接触电阻不计),两电极相距L=0.700m,其间充满待测的导电溶液.用如下器材进行测量:
电压表(量程l5V,内阻约30kΩ); 电流表(量程300μA,内约50Ω);
滑动变阻器(10Ω,1A); 电池组(电动势E=12V,内阻r=6Ω);
单刀单掷开关一个、导线若干.
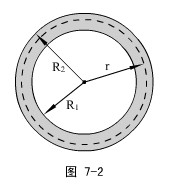
下表是测量通过管中导电液柱的电流及两端电压的实验数据.实验中用20分度的游标卡尺测量了玻璃管的内径,结果如图3所示.
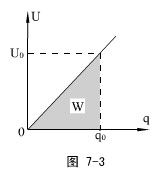
| U/V | 0 | 1.0 | 3.0 | 5.0 | 7.0 | 9.0 | 11.0 |
| I/μA | 0 | 22 | 65 | 109 | 155 | 175 | 240 |
①玻璃管内径d=
②请在图2中补画出未连接的导线.
③根据表数据在图4坐标中已描点,请作出U-I图象,由图象求出电阻R=
④计算该导电溶液的电阻率表达式是:ρ=
第八部分 静电场
第一讲 基本知识介绍
在奥赛考纲中,静电学知识点数目不算多,总数和高考考纲基本相同,但在个别知识点上,奥赛的要求显然更加深化了:如非匀强电场中电势的计算、电容器的连接和静电能计算、电介质的极化等。在处理物理问题的方法上,对无限分割和叠加原理提出了更高的要求。
如果把静电场的问题分为两部分,那就是电场本身的问题、和对场中带电体的研究,高考考纲比较注重第二部分中带电粒子的运动问题,而奥赛考纲更注重第一部分和第二部分中的静态问题。也就是说,奥赛关注的是电场中更本质的内容,关注的是纵向的深化和而非横向的综合。
一、电场强度
1、实验定律
a、库仑定律
内容;
条件:⑴点电荷,⑵真空,⑶点电荷静止或相对静止。事实上,条件⑴和⑵均不能视为对库仑定律的限制,因为叠加原理可以将点电荷之间的静电力应用到一般带电体,非真空介质可以通过介电常数将k进行修正(如果介质分布是均匀和“充分宽广”的,一般认为k′= k /εr)。只有条件⑶,它才是静电学的基本前提和出发点(但这一点又是常常被忽视和被不恰当地“综合应用”的)。
b、电荷守恒定律
c、叠加原理
2、电场强度
a、电场强度的定义
电场的概念;试探电荷(检验电荷);定义意味着一种适用于任何电场的对电场的检测手段;电场线是抽象而直观地描述电场有效工具(电场线的基本属性)。
b、不同电场中场强的计算
决定电场强弱的因素有两个:场源(带电量和带电体的形状)和空间位置。这可以从不同电场的场强决定式看出——
⑴点电荷:E = k![]()
结合点电荷的场强和叠加原理,我们可以求出任何电场的场强,如——
⑵均匀带电环,垂直环面轴线上的某点P:E = ![]() ,其中r和R的意义见图7-1。
,其中r和R的意义见图7-1。
⑶均匀带电球壳
内部:E内 = 0
外部:E外 = k![]() ,其中r指考察点到球心的距离
,其中r指考察点到球心的距离
如果球壳是有厚度的的(内径R1 、外径R2),在壳体中(R1<r<R2):
E = ![]() ,其中ρ为电荷体密度。这个式子的物理意义可以参照万有引力定律当中(条件部分)的“剥皮法则”理解〔
,其中ρ为电荷体密度。这个式子的物理意义可以参照万有引力定律当中(条件部分)的“剥皮法则”理解〔![]() 即为图7-2中虚线以内部分的总电量…〕。
即为图7-2中虚线以内部分的总电量…〕。
⑷无限长均匀带电直线(电荷线密度为λ):E = ![]()
⑸无限大均匀带电平面(电荷面密度为σ):E = 2πkσ
二、电势
1、电势:把一电荷从P点移到参考点P0时电场力所做的功W与该电荷电量q的比值,即
U = ![]()
参考点即电势为零的点,通常取无穷远或大地为参考点。
和场强一样,电势是属于场本身的物理量。W则为电荷的电势能。
2、典型电场的电势
a、点电荷
以无穷远为参考点,U = k![]()
b、均匀带电球壳
以无穷远为参考点,U外 = k![]() ,U内 = k
,U内 = k![]()
3、电势的叠加
由于电势的是标量,所以电势的叠加服从代数加法。很显然,有了点电荷电势的表达式和叠加原理,我们可以求出任何电场的电势分布。
4、电场力对电荷做功
WAB = q(UA - UB)= qUAB
三、静电场中的导体
静电感应→静电平衡(狭义和广义)→静电屏蔽
1、静电平衡的特征可以总结为以下三层含义——
a、导体内部的合场强为零;表面的合场强不为零且一般各处不等,表面的合场强方向总是垂直导体表面。
b、导体是等势体,表面是等势面。
c、导体内部没有净电荷;孤立导体的净电荷在表面的分布情况取决于导体表面的曲率。
2、静电屏蔽
导体壳(网罩)不接地时,可以实现外部对内部的屏蔽,但不能实现内部对外部的屏蔽;导体壳(网罩)接地后,既可实现外部对内部的屏蔽,也可实现内部对外部的屏蔽。
四、电容
1、电容器
孤立导体电容器→一般电容器
2、电容
a、定义式 C = ![]()
b、决定式。决定电容器电容的因素是:导体的形状和位置关系、绝缘介质的种类,所以不同电容器有不同的电容
⑴平行板电容器 C = ![]() =
= ![]() ,其中ε为绝对介电常数(真空中ε0 =
,其中ε为绝对介电常数(真空中ε0 = ![]() ,其它介质中ε=
,其它介质中ε= ![]() ),εr则为相对介电常数,εr =
),εr则为相对介电常数,εr = ![]() 。
。
⑵柱形电容器:C = ![]()
⑶球形电容器:C = ![]()
3、电容器的连接
a、串联 ![]() =
= ![]() +
+![]() +
+![]() + … +
+ … +![]()
b、并联 C = C1 + C2 + C3 + … + Cn
4、电容器的能量
用图7-3表征电容器的充电过程,“搬运”电荷做功W就是图中阴影的面积,这也就是电容器的储能E ,所以
E = ![]() q0U0 =
q0U0 = ![]() C
C![]() =
= ![]()
![]()
电场的能量。电容器储存的能量究竟是属于电荷还是属于电场?正确答案是后者,因此,我们可以将电容器的能量用场强E表示。
对平行板电容器 E总 = ![]() E2
E2
认为电场能均匀分布在电场中,则单位体积的电场储能 w = ![]() E2 。而且,这以结论适用于非匀强电场。
E2 。而且,这以结论适用于非匀强电场。
五、电介质的极化
1、电介质的极化
a、电介质分为两类:无极分子和有极分子,前者是指在没有外电场时每个分子的正、负电荷“重心”彼此重合(如气态的H2 、O2 、N2和CO2),后者则反之(如气态的H2O 、SO2和液态的水硝基笨)
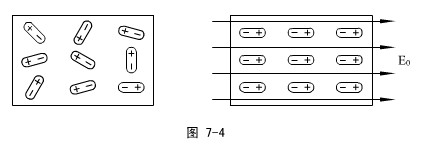
b、电介质的极化:当介质中存在外电场时,无极分子会变为有极分子,有极分子会由原来的杂乱排列变成规则排列,如图7-4所示。
2、束缚电荷、自由电荷、极化电荷与宏观过剩电荷
a、束缚电荷与自由电荷:在图7-4中,电介质左右两端分别显现负电和正电,但这些电荷并不能自由移动,因此称为束缚电荷,除了电介质,导体中的原子核和内层电子也是束缚电荷;反之,能够自由移动的电荷称为自由电荷。事实上,导体中存在束缚电荷与自由电荷,绝缘体中也存在束缚电荷和自由电荷,只是它们的比例差异较大而已。
b、极化电荷是更严格意义上的束缚电荷,就是指图7-4中电介质两端显现的电荷。而宏观过剩电荷是相对极化电荷来说的,它是指可以自由移动的净电荷。宏观过剩电荷与极化电荷的重要区别是:前者能够用来冲放电,也能用仪表测量,但后者却不能。
第二讲 重要模型与专题
一、场强和电场力
【物理情形1】试证明:均匀带电球壳内部任意一点的场强均为零。
【模型分析】这是一个叠加原理应用的基本事例。
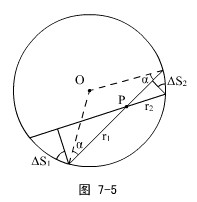
如图7-5所示,在球壳内取一点P ,以P为顶点做两个对顶的、顶角很小的锥体,锥体与球面相交得到球面上的两个面元ΔS1和ΔS2 ,设球面的电荷面密度为σ,则这两个面元在P点激发的场强分别为
ΔE1 = k![]()
ΔE2 = k![]()
为了弄清ΔE1和ΔE2的大小关系,引进锥体顶部的立体角ΔΩ ,显然
![]() = ΔΩ =
= ΔΩ = ![]()
所以 ΔE1 = k![]() ,ΔE2 = k
,ΔE2 = k![]() ,即:ΔE1 = ΔE2 ,而它们的方向是相反的,故在P点激发的合场强为零。
,即:ΔE1 = ΔE2 ,而它们的方向是相反的,故在P点激发的合场强为零。
同理,其它各个相对的面元ΔS3和ΔS4 、ΔS5和ΔS6 … 激发的合场强均为零。原命题得证。
【模型变换】半径为R的均匀带电球面,电荷的面密度为σ,试求球心处的电场强度。
【解析】如图7-6所示,在球面上的P处取一极小的面元ΔS ,它在球心O点激发的场强大小为
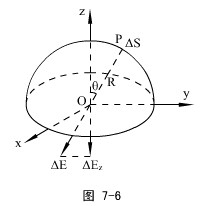
ΔE = k![]() ,方向由P指向O点。
,方向由P指向O点。
无穷多个这样的面元激发的场强大小和ΔS激发的完全相同,但方向各不相同,它们矢量合成的效果怎样呢?这里我们要大胆地预见——由于由于在x方向、y方向上的对称性,Σ![]() = Σ
= Σ![]() = 0 ,最后的ΣE = ΣEz ,所以先求
= 0 ,最后的ΣE = ΣEz ,所以先求
ΔEz = ΔEcosθ= k![]() ,而且ΔScosθ为面元在xoy平面的投影,设为ΔS′
,而且ΔScosθ为面元在xoy平面的投影,设为ΔS′
所以 ΣEz = ![]() ΣΔS′
ΣΔS′
而 ΣΔS′= πR2
【答案】E = kπσ ,方向垂直边界线所在的平面。
〖学员思考〗如果这个半球面在yoz平面的两边均匀带有异种电荷,面密度仍为σ,那么,球心处的场强又是多少?
〖推荐解法〗将半球面看成4个![]() 球面,每个
球面,每个![]() 球面在x、y、z三个方向上分量均为
球面在x、y、z三个方向上分量均为![]() kπσ,能够对称抵消的将是y、z两个方向上的分量,因此ΣE = ΣEx …
kπσ,能够对称抵消的将是y、z两个方向上的分量,因此ΣE = ΣEx …
〖答案〗大小为kπσ,方向沿x轴方向(由带正电的一方指向带负电的一方)。
【物理情形2】有一个均匀的带电球体,球心在O点,半径为R ,电荷体密度为ρ ,球体内有一个球形空腔,空腔球心在O′点,半径为R′,![]() = a ,如图7-7所示,试求空腔中各点的场强。
= a ,如图7-7所示,试求空腔中各点的场强。
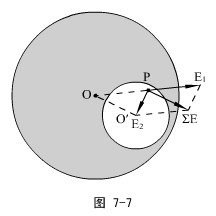
【模型分析】这里涉及两个知识的应用:一是均匀带电球体的场强定式(它也是来自叠加原理,这里具体用到的是球体内部的结论,即“剥皮法则”),二是填补法。
将球体和空腔看成完整的带正电的大球和带负电(电荷体密度相等)的小球的集合,对于空腔中任意一点P ,设![]() = r1 ,
= r1 ,![]() = r2 ,则大球激发的场强为
= r2 ,则大球激发的场强为
E1 = k![]() =
= ![]() kρπr1 ,方向由O指向P
kρπr1 ,方向由O指向P
“小球”激发的场强为
E2 = k![]() =
= ![]() kρπr2 ,方向由P指向O′
kρπr2 ,方向由P指向O′
E1和E2的矢量合成遵从平行四边形法则,ΣE的方向如图。又由于矢量三角形PE1ΣE和空间位置三角形OP O′是相似的,ΣE的大小和方向就不难确定了。
【答案】恒为![]() kρπa ,方向均沿O → O′,空腔里的电场是匀强电场。
kρπa ,方向均沿O → O′,空腔里的电场是匀强电场。
〖学员思考〗如果在模型2中的OO′连线上O′一侧距离O为b(b>R)的地方放一个电量为q的点电荷,它受到的电场力将为多大?
〖解说〗上面解法的按部就班应用…
〖答〗![]() πkρq〔
πkρq〔![]() ?
?![]() 〕。
〕。
二、电势、电量与电场力的功
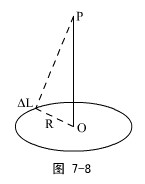
【物理情形1】如图7-8所示,半径为R的圆环均匀带电,电荷线密度为λ,圆心在O点,过圆心跟环面垂直的轴线上有P点,![]() = r ,以无穷远为参考点,试求P点的电势UP 。
= r ,以无穷远为参考点,试求P点的电势UP 。
【模型分析】这是一个电势标量叠加的简单模型。先在圆环上取一个元段ΔL ,它在P点形成的电势
ΔU = k![]()
环共有![]() 段,各段在P点形成的电势相同,而且它们是标量叠加。
段,各段在P点形成的电势相同,而且它们是标量叠加。
【答案】UP = ![]()
〖思考〗如果上题中知道的是环的总电量Q ,则UP的结论为多少?如果这个总电量的分布不是均匀的,结论会改变吗?
〖答〗UP = ![]() ;结论不会改变。
;结论不会改变。
〖再思考〗将环换成半径为R的薄球壳,总电量仍为Q ,试问:(1)当电量均匀分布时,球心电势为多少?球内(包括表面)各点电势为多少?(2)当电量不均匀分布时,球心电势为多少?球内(包括表面)各点电势为多少?
〖解说〗(1)球心电势的求解从略;
球内任一点的求解参看图7-5
ΔU1 = k![]() = k
= k![]() ·
·![]() = kσΔΩ
= kσΔΩ![]()
ΔU2 = kσΔΩ![]()
它们代数叠加成 ΔU = ΔU1 + ΔU2 = kσΔΩ![]()
而 r1 + r2 = 2Rcosα
所以 ΔU = 2RkσΔΩ
所有面元形成电势的叠加 ΣU = 2RkσΣΔΩ
注意:一个完整球面的ΣΔΩ = 4π(单位:球面度sr),但作为对顶的锥角,ΣΔΩ只能是2π ,所以——
ΣU = 4πRkσ= k![]()
(2)球心电势的求解和〖思考〗相同;
球内任一点的电势求解可以从(1)问的求解过程得到结论的反证。
〖答〗(1)球心、球内任一点的电势均为k![]() ;(2)球心电势仍为k
;(2)球心电势仍为k![]() ,但其它各点的电势将随电量的分布情况的不同而不同(内部不再是等势体,球面不再是等势面)。
,但其它各点的电势将随电量的分布情况的不同而不同(内部不再是等势体,球面不再是等势面)。
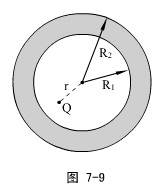
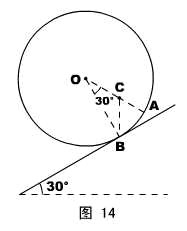
【相关应用】如图7-9所示,球形导体空腔内、外壁的半径分别为R1和R2 ,带有净电量+q ,现在其内部距球心为r的地方放一个电量为+Q的点电荷,试求球心处的电势。
【解析】由于静电感应,球壳的内、外壁形成两个带电球壳。球心电势是两个球壳形成电势、点电荷形成电势的合效果。
根据静电感应的尝试,内壁的电荷量为-Q ,外壁的电荷量为+Q+q ,虽然内壁的带电是不均匀的,根据上面的结论,其在球心形成的电势仍可以应用定式,所以…
【答案】Uo = k![]() - k
- k![]() + k
+ k![]() 。
。
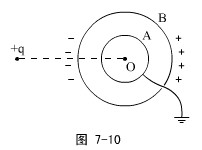
〖反馈练习〗如图7-10所示,两个极薄的同心导体球壳A和B,半径分别为RA和RB ,现让A壳接地,而在B壳的外部距球心d的地方放一个电量为+q的点电荷。试求:(1)A球壳的感应电荷量;(2)外球壳的电势。
〖解说〗这是一个更为复杂的静电感应情形,B壳将形成图示的感应电荷分布(但没有净电量),A壳的情形未画出(有净电量),它们的感应电荷分布都是不均匀的。
此外,我们还要用到一个重要的常识:接地导体(A壳)的电势为零。但值得注意的是,这里的“为零”是一个合效果,它是点电荷q 、A壳、B壳(带同样电荷时)单独存在时在A中形成的的电势的代数和,所以,当我们以球心O点为对象,有
UO = k![]() + k
+ k![]() + k
+ k![]() = 0
= 0
QB应指B球壳上的净电荷量,故 QB = 0
所以 QA = -![]() q
q
☆学员讨论:A壳的各处电势均为零,我们的方程能不能针对A壳表面上的某点去列?(答:不能,非均匀带电球壳的球心以外的点不能应用定式!)
基于刚才的讨论,求B的电势时也只能求B的球心的电势(独立的B壳是等势体,球心电势即为所求)——
UB = k![]() + k
+ k![]()
〖答〗(1)QA = -![]() q ;(2)UB = k
q ;(2)UB = k![]() (1-
(1-![]() ) 。
) 。
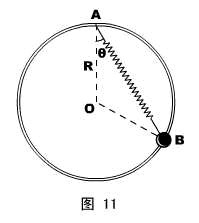
【物理情形2】图7-11中,三根实线表示三根首尾相连的等长绝缘细棒,每根棒上的电荷分布情况与绝缘棒都换成导体棒时完全相同。点A是Δabc的中心,点B则与A相对bc棒对称,且已测得它们的电势分别为UA和UB 。试问:若将ab棒取走,A、B两点的电势将变为多少?
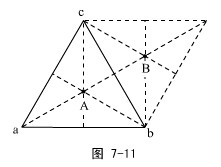
【模型分析】由于细棒上的电荷分布既不均匀、三根细棒也没有构成环形,故前面的定式不能直接应用。若用元段分割→叠加,也具有相当的困难。所以这里介绍另一种求电势的方法。
每根细棒的电荷分布虽然复杂,但相对各自的中点必然是对称的,而且三根棒的总电量、分布情况彼此必然相同。这就意味着:①三棒对A点的电势贡献都相同(可设为U1);②ab棒、ac棒对B点的电势贡献相同(可设为U2);③bc棒对A、B两点的贡献相同(为U1)。
所以,取走ab前 3U1 = UA
2U2 + U1 = UB
取走ab后,因三棒是绝缘体,电荷分布不变,故电势贡献不变,所以
UA′= 2U1
UB′= U1 + U2
【答案】UA′= ![]() UA ;UB′=
UA ;UB′= ![]() UA +
UA + ![]() UB 。
UB 。
〖模型变换〗正四面体盒子由彼此绝缘的四块导体板构成,各导体板带电且电势分别为U1 、U2 、U3和U4 ,则盒子中心点O的电势U等于多少?
〖解说〗此处的四块板子虽然位置相对O点具有对称性,但电量各不相同,因此对O点的电势贡献也不相同,所以应该想一点办法——
我们用“填补法”将电量不对称的情形加以改观:先将每一块导体板复制三块,作成一个正四面体盒子,然后将这四个盒子位置重合地放置——构成一个有四层壁的新盒子。在这个新盒子中,每个壁的电量将是完全相同的(为原来四块板的电量之和)、电势也完全相同(为U1 + U2 + U3 + U4),新盒子表面就构成了一个等势面、整个盒子也是一个等势体,故新盒子的中心电势为
U′= U1 + U2 + U3 + U4
最后回到原来的单层盒子,中心电势必为 U = ![]() U′
U′
〖答〗U = ![]() (U1 + U2 + U3 + U4)。
(U1 + U2 + U3 + U4)。
☆学员讨论:刚才的这种解题思想是否适用于“物理情形2”?(答:不行,因为三角形各边上电势虽然相等,但中点的电势和边上的并不相等。)
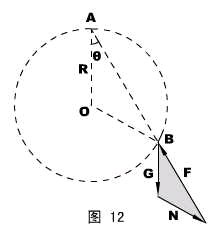
〖反馈练习〗电荷q均匀分布在半球面ACB上,球面半径为R ,CD为通过半球顶点C和球心O的轴线,如图7-12所示。P、Q为CD轴线上相对O点对称的两点,已知P点的电势为UP ,试求Q点的电势UQ 。
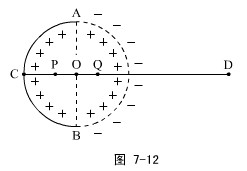
〖解说〗这又是一个填补法的应用。将半球面补成完整球面,并令右边内、外层均匀地带上电量为q的电荷,如图7-12所示。
从电量的角度看,右半球面可以看作不存在,故这时P、Q的电势不会有任何改变。
而换一个角度看,P、Q的电势可以看成是两者的叠加:①带电量为2q的完整球面;②带电量为-q的半球面。
考查P点,UP = k![]() + U半球面
+ U半球面
其中 U半球面显然和为填补时Q点的电势大小相等、符号相反,即 U半球面= -UQ
以上的两个关系已经足以解题了。
〖答〗UQ = k![]() - UP 。
- UP 。
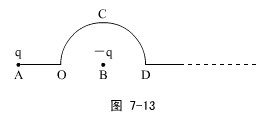
【物理情形3】如图7-13所示,A、B两点相距2L ,圆弧![]() 是以B为圆心、L为半径的半圆。A处放有电量为q的电荷,B处放有电量为-q的点电荷。试问:(1)将单位正电荷从O点沿
是以B为圆心、L为半径的半圆。A处放有电量为q的电荷,B处放有电量为-q的点电荷。试问:(1)将单位正电荷从O点沿![]() 移到D点,电场力对它做了多少功?(2)将单位负电荷从D点沿AB的延长线移到无穷远处去,电场力对它做多少功?
移到D点,电场力对它做了多少功?(2)将单位负电荷从D点沿AB的延长线移到无穷远处去,电场力对它做多少功?
【模型分析】电势叠加和关系WAB = q(UA - UB)= qUAB的基本应用。
UO = k![]() + k
+ k![]() = 0
= 0
UD = k![]() + k
+ k![]() = -
= -![]()
U∞ = 0
再用功与电势的关系即可。
【答案】(1)![]() ;(2)
;(2)![]() 。
。
【相关应用】在不计重力空间,有A、B两个带电小球,电量分别为q1和q2 ,质量分别为m1和m2 ,被固定在相距L的两点。试问:(1)若解除A球的固定,它能获得的最大动能是多少?(2)若同时解除两球的固定,它们各自的获得的最大动能是多少?(3)未解除固定时,这个系统的静电势能是多少?
【解说】第(1)问甚间;第(2)问在能量方面类比反冲装置的能量计算,另启用动量守恒关系;第(3)问是在前两问基础上得出的必然结论…(这里就回到了一个基本的观念斧正:势能是属于场和场中物体的系统,而非单纯属于场中物体——这在过去一直是被忽视的。在两个点电荷的环境中,我们通常说“两个点电荷的势能”是多少。)
【答】(1)k![]() ;(2)Ek1 =
;(2)Ek1 = ![]() k
k![]() ,Ek2 =
,Ek2 = ![]() k
k![]() ;(3)k
;(3)k![]() 。
。
〖思考〗设三个点电荷的电量分别为q1 、q2和q3 ,两两相距为r12 、r23和r31 ,则这个点电荷系统的静电势能是多少?
〖解〗略。
〖答〗k(![]() +
+![]() +
+![]() )。
)。
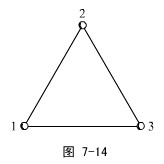
〖反馈应用〗如图7-14所示,三个带同种电荷的相同金属小球,每个球的质量均为m 、电量均为q ,用长度为L的三根绝缘轻绳连接着,系统放在光滑、绝缘的水平面上。现将其中的一根绳子剪断,三个球将开始运动起来,试求中间这个小球的最大速度。
〖解〗设剪断的是1、3之间的绳子,动力学分析易知,2球获得最大动能时,1、2之间的绳子与2、3之间的绳子刚好应该在一条直线上。而且由动量守恒知,三球不可能有沿绳子方向的速度。设2球的速度为v ,1球和3球的速度为v′,则
动量关系 mv + 2m v′= 0
能量关系 3k![]() = 2 k
= 2 k![]() + k
+ k![]() +
+ ![]() mv2 +
mv2 + ![]() 2m
2m![]()
解以上两式即可的v值。
〖答〗v = q![]() 。
。
三、电场中的导体和电介质
【物理情形】两块平行放置的很大的金属薄板A和B,面积都是S ,间距为d(d远小于金属板的线度),已知A板带净电量+Q1 ,B板带尽电量+Q2 ,且Q2<Q1 ,试求:(1)两板内外表面的电量分别是多少;(2)空间各处的场强;(3)两板间的电势差。
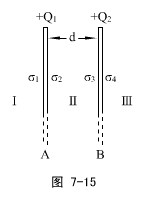
【模型分析】由于静电感应,A、B两板的四个平面的电量将呈现一定规律的分布(金属板虽然很薄,但内部合场强为零的结论还是存在的);这里应注意金属板“很大”的前提条件,它事实上是指物理无穷大,因此,可以应用无限大平板的场强定式。
为方便解题,做图7-15,忽略边缘效应,四个面的电荷分布应是均匀的,设四个面的电荷面密度分别为σ1 、σ2 、σ3和σ4 ,显然
(σ1 + σ2)S = Q1
(σ3 + σ4)S = Q2
A板内部空间场强为零,有 2πk(σ1 ? σ2 ? σ3 ? σ4)= 0
A板内部空间场强为零,有 2πk(σ1 + σ2 + σ3 ? σ4)= 0
解以上四式易得 σ1 = σ4 = ![]()
σ2 = ?σ3 = ![]()
有了四个面的电荷密度,Ⅰ、Ⅱ、Ⅲ空间的场强就好求了〔如EⅡ =2πk(σ1 + σ2 ? σ3 ? σ4)= 2πk![]() 〕。
〕。
最后,UAB = EⅡd
【答案】(1)A板外侧电量![]() 、A板内侧电量
、A板内侧电量![]() ,B板内侧电量?
,B板内侧电量?![]() 、B板外侧电量
、B板外侧电量![]() ;(2)A板外侧空间场强2πk
;(2)A板外侧空间场强2πk![]() ,方向垂直A板向外,A、B板之间空间场强2πk
,方向垂直A板向外,A、B板之间空间场强2πk![]() ,方向由A垂直指向B,B板外侧空间场强2πk
,方向由A垂直指向B,B板外侧空间场强2πk![]() ,方向垂直B板向外;(3)A、B两板的电势差为2πkd
,方向垂直B板向外;(3)A、B两板的电势差为2πkd![]() ,A板电势高。
,A板电势高。
〖学员思考〗如果两板带等量异号的净电荷,两板的外侧空间场强等于多少?(答:为零。)
〖学员讨论〗(原模型中)作为一个电容器,它的“电量”是多少(答:![]() )?如果在板间充满相对介电常数为εr的电介质,是否会影响四个面的电荷分布(答:不会)?是否会影响三个空间的场强(答:只会影响Ⅱ空间的场强)?
)?如果在板间充满相对介电常数为εr的电介质,是否会影响四个面的电荷分布(答:不会)?是否会影响三个空间的场强(答:只会影响Ⅱ空间的场强)?
〖学员讨论〗(原模型中)我们是否可以求出A、B两板之间的静电力?〔答:可以;以A为对象,外侧受力![]() ·
·![]() (方向相左),内侧受力
(方向相左),内侧受力![]() ·
·![]() (方向向右),它们合成即可,结论为F =
(方向向右),它们合成即可,结论为F = ![]() Q1Q2 ,排斥力。〕
Q1Q2 ,排斥力。〕

【模型变换】如图7-16所示,一平行板电容器,极板面积为S ,其上半部为真空,而下半部充满相对介电常数为εr的均匀电介质,当两极板分别带上+Q和?Q的电量后,试求:(1)板上自由电荷的分布;(2)两板之间的场强;(3)介质表面的极化电荷。
【解说】电介质的充入虽然不能改变内表面的电量总数,但由于改变了场强,故对电荷的分布情况肯定有影响。设真空部分电量为Q1 ,介质部分电量为Q2 ,显然有
Q1 + Q2 = Q
两板分别为等势体,将电容器看成上下两个电容器的并联,必有
U1 = U2 即 ![]() =
= ![]() ,即
,即 ![]() =
= ![]()
解以上两式即可得Q1和Q2 。
场强可以根据E = ![]() 关系求解,比较常规(上下部分的场强相等)。
关系求解,比较常规(上下部分的场强相等)。
上下部分的电量是不等的,但场强居然相等,这怎么解释?从公式的角度看,E = 2πkσ(单面平板),当k 、σ同时改变,可以保持E不变,但这是一种结论所展示的表象。从内在的角度看,k的改变正是由于极化电荷的出现所致,也就是说,极化电荷的存在相当于在真空中形成了一个新的电场,正是这个电场与自由电荷(在真空中)形成的电场叠加成为E2 ,所以
E2 = 4πk(σ ? σ′)= 4πk(![]() ?
? ![]() )
)
请注意:①这里的σ′和Q′是指极化电荷的面密度和总量;② E = 4πkσ的关系是由两个带电面叠加的合效果。
【答案】(1)真空部分的电量为![]() Q ,介质部分的电量为
Q ,介质部分的电量为![]() Q ;(2)整个空间的场强均为
Q ;(2)整个空间的场强均为![]() ;(3)
;(3)![]() Q 。
Q 。
〖思考应用〗一个带电量为Q的金属小球,周围充满相对介电常数为εr的均匀电介质,试求与与导体表面接触的介质表面的极化电荷量。
〖解〗略。
〖答〗Q′= ![]() Q 。
Q 。
四、电容器的相关计算
【物理情形1】由许多个电容为C的电容器组成一个如图7-17所示的多级网络,试问:(1)在最后一级的右边并联一个多大电容C′,可使整个网络的A、B两端电容也为C′?(2)不接C′,但无限地增加网络的级数,整个网络A、B两端的总电容是多少?
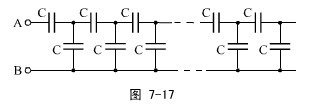
【模型分析】这是一个练习电容电路简化基本事例。
第(1)问中,未给出具体级数,一般结论应适用特殊情形:令级数为1 ,于是
![]() +
+ ![]() =
= ![]() 解C′即可。
解C′即可。
第(2)问中,因为“无限”,所以“无限加一级后仍为无限”,不难得出方程
![]() +
+ ![]() =
= ![]()
【答案】(1)![]() C ;(2)
C ;(2)![]() C 。
C 。
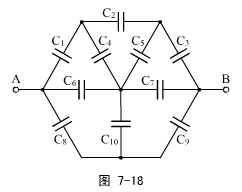
【相关模型】在图7-18所示的电路中,已知C1 = C2 = C3 = C9 = 1μF ,C4 = C5 = C6 = C7 = 2μF ,C8 = C10 = 3μF ,试求A、B之间的等效电容。
【解说】对于既非串联也非并联的电路,需要用到一种“Δ→Y型变换”,参见图7-19,根据三个端点之间的电容等效,容易得出定式——
Δ→Y型:Ca = ![]()
Cb = ![]()
Cc = ![]()
Y→Δ型:C1 = ![]()
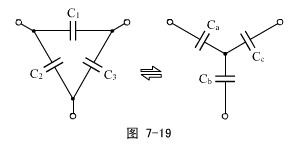
C2 = ![]()
C3 = ![]()
有了这样的定式后,我们便可以进行如图7-20所示的四步电路简化(为了方便,电容不宜引进新的符号表达,而是直接将变换后的量值标示在图中)——
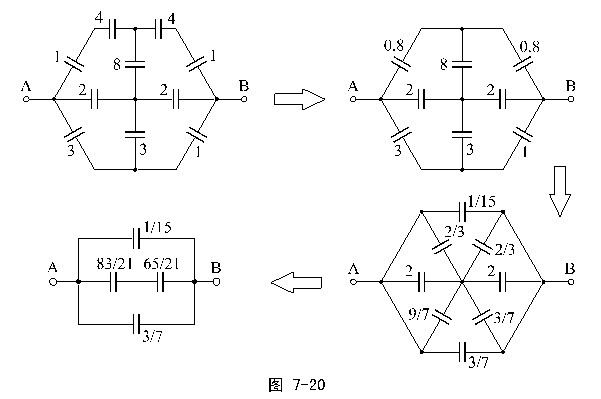
【答】约2.23μF 。
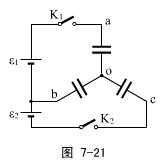
【物理情形2】如图7-21所示的电路中,三个电容器完全相同,电源电动势ε1 = 3.0V ,ε2 = 4.5V,开关K1和K2接通前电容器均未带电,试求K1和K2接通后三个电容器的电压Uao 、Ubo和Uco各为多少。
【解说】这是一个考查电容器电路的基本习题,解题的关键是要抓与o相连的三块极板(俗称“孤岛”)的总电量为零。
电量关系:![]() +
+![]() +
+![]() = 0
= 0
电势关系:ε1 = Uao + Uob = Uao ? Ubo
ε2 = Ubo + Uoc = Ubo ? Uco
解以上三式即可。
【答】Uao = 3.5V ,Ubo = 0.5V ,Uco = ?4.0V 。
【伸展应用】如图7-22所示,由n个单元组成的电容器网络,每一个单元由三个电容器连接而成,其中有两个的电容为3C ,另一个的电容为3C 。以a、b为网络的输入端,a′、b′为输出端,今在a、b间加一个恒定电压U ,而在a′b′间接一个电容为C的电容器,试求:(1)从第k单元输入端算起,后面所有电容器储存的总电能;(2)若把第一单元输出端与后面断开,再除去电源,并把它的输入端短路,则这个单元的三个电容器储存的总电能是多少?
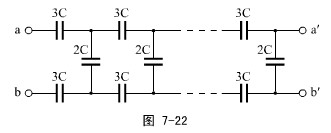
【解说】这是一个结合网络计算和“孤岛现象”的典型事例。
(1)类似“物理情形1”的计算,可得 C总 = Ck = C
所以,从输入端算起,第k单元后的电压的经验公式为 Uk = ![]()
再算能量储存就不难了。
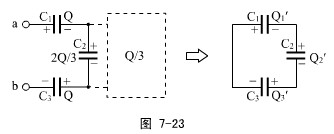
(2)断开前,可以算出第一单元的三个电容器、以及后面“系统”的电量分配如图7-23中的左图所示。这时,C1的右板和C2的左板(或C2的下板和C3的右板)形成“孤岛”。此后,电容器的相互充电过程(C3类比为“电源”)满足——
电量关系:Q1′= Q3′
Q2′+ Q3′= ![]()
电势关系:![]() +
+ ![]() =
= ![]()
从以上三式解得 Q1′= Q3′= ![]() ,Q2′=
,Q2′= ![]() ,这样系统的储能就可以用
,这样系统的储能就可以用![]()
![]() 得出了。
得出了。
【答】(1)Ek = ![]() ;(2)
;(2)![]() 。
。
〖学员思考〗图7-23展示的过程中,始末状态的电容器储能是否一样?(答:不一样;在相互充电的过程中,导线消耗的焦耳热已不可忽略。)
☆第七部分完☆
查看习题详情和答案>>第二部分 牛顿运动定律
第一讲 牛顿三定律
一、牛顿第一定律
1、定律。惯性的量度
2、观念意义,突破“初态困惑”
二、牛顿第二定律
1、定律
2、理解要点
a、矢量性
b、独立作用性:ΣF → a ,ΣFx → ax …
c、瞬时性。合力可突变,故加速度可突变(与之对比:速度和位移不可突变);牛顿第二定律展示了加速度的决定式(加速度的定义式仅仅展示了加速度的“测量手段”)。
3、适用条件
a、宏观、低速
b、惯性系
对于非惯性系的定律修正——引入惯性力、参与受力分析
三、牛顿第三定律
1、定律
2、理解要点
a、同性质(但不同物体)
b、等时效(同增同减)
c、无条件(与运动状态、空间选择无关)
第二讲 牛顿定律的应用
一、牛顿第一、第二定律的应用
单独应用牛顿第一定律的物理问题比较少,一般是需要用其解决物理问题中的某一个环节。
应用要点:合力为零时,物体靠惯性维持原有运动状态;只有物体有加速度时才需要合力。有质量的物体才有惯性。a可以突变而v、s不可突变。
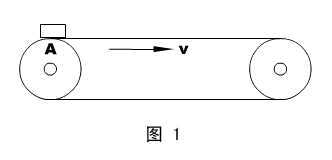
1、如图1所示,在马达的驱动下,皮带运输机上方的皮带以恒定的速度向右运动。现将一工件(大小不计)在皮带左端A点轻轻放下,则在此后的过程中( )
A、一段时间内,工件将在滑动摩擦力作用下,对地做加速运动
B、当工件的速度等于v时,它与皮带之间的摩擦力变为静摩擦力
C、当工件相对皮带静止时,它位于皮带上A点右侧的某一点
D、工件在皮带上有可能不存在与皮带相对静止的状态
解说:B选项需要用到牛顿第一定律,A、C、D选项用到牛顿第二定律。
较难突破的是A选项,在为什么不会“立即跟上皮带”的问题上,建议使用反证法(t → 0 ,a → ∞ ,则ΣFx → ∞ ,必然会出现“供不应求”的局面)和比较法(为什么人跳上速度不大的物体可以不发生相对滑动?因为人是可以形变、重心可以调节的特殊“物体”)
此外,本题的D选项还要用到匀变速运动规律。用匀变速运动规律和牛顿第二定律不难得出
只有当L > ![]() 时(其中μ为工件与皮带之间的动摩擦因素),才有相对静止的过程,否则没有。
时(其中μ为工件与皮带之间的动摩擦因素),才有相对静止的过程,否则没有。
答案:A、D
思考:令L = 10m ,v = 2 m/s ,μ= 0.2 ,g取10 m/s2 ,试求工件到达皮带右端的时间t(过程略,答案为5.5s)
进阶练习:在上面“思考”题中,将工件给予一水平向右的初速v0 ,其它条件不变,再求t(学生分以下三组进行)——
① v0 = 1m/s (答:0.5 + 37/8 = 5.13s)
② v0 = 4m/s (答:1.0 + 3.5 = 4.5s)
③ v0 = 1m/s (答:1.55s)
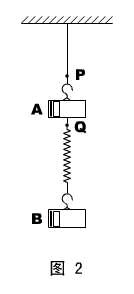
2、质量均为m的两只钩码A和B,用轻弹簧和轻绳连接,然后挂在天花板上,如图2所示。试问:
① 如果在P处剪断细绳,在剪断瞬时,B的加速度是多少?
② 如果在Q处剪断弹簧,在剪断瞬时,B的加速度又是多少?
解说:第①问是常规处理。由于“弹簧不会立即发生形变”,故剪断瞬间弹簧弹力维持原值,所以此时B钩码的加速度为零(A的加速度则为2g)。
第②问需要我们反省这样一个问题:“弹簧不会立即发生形变”的原因是什么?是A、B两物的惯性,且速度v和位移s不能突变。但在Q点剪断弹簧时,弹簧却是没有惯性的(没有质量),遵从理想模型的条件,弹簧应在一瞬间恢复原长!即弹簧弹力突变为零。
答案:0 ;g 。
二、牛顿第二定律的应用
应用要点:受力较少时,直接应用牛顿第二定律的“矢量性”解题。受力比较多时,结合正交分解与“独立作用性”解题。
在难度方面,“瞬时性”问题相对较大。
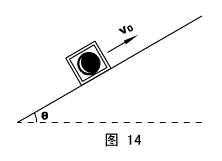
1、滑块在固定、光滑、倾角为θ的斜面上下滑,试求其加速度。
解说:受力分析 → 根据“矢量性”定合力方向 → 牛顿第二定律应用
答案:gsinθ。
思考:如果斜面解除固定,上表仍光滑,倾角仍为θ,要求滑块与斜面相对静止,斜面应具备一个多大的水平加速度?(解题思路完全相同,研究对象仍为滑块。但在第二环节上应注意区别。答:gtgθ。)
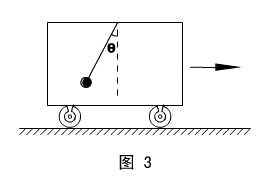
进阶练习1:在一向右运动的车厢中,用细绳悬挂的小球呈现如图3所示的稳定状态,试求车厢的加速度。(和“思考”题同理,答:gtgθ。)
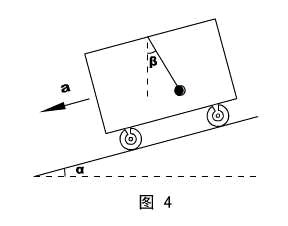
进阶练习2、如图4所示,小车在倾角为α的斜面上匀加速运动,车厢顶用细绳悬挂一小球,发现悬绳与竖直方向形成一个稳定的夹角β。试求小车的加速度。
解:继续贯彻“矢量性”的应用,但数学处理复杂了一些(正弦定理解三角形)。
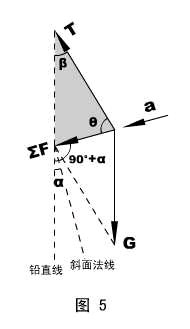
分析小球受力后,根据“矢量性”我们可以做如图5所示的平行四边形,并找到相应的夹角。设张力T与斜面方向的夹角为θ,则
θ=(90°+ α)- β= 90°-(β-α) (1)
对灰色三角形用正弦定理,有
![]() =
= ![]() (2)
(2)
解(1)(2)两式得:ΣF = ![]()
最后运用牛顿第二定律即可求小球加速度(即小车加速度)
答:![]() 。
。
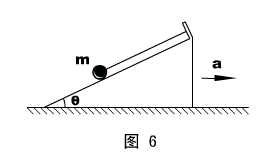
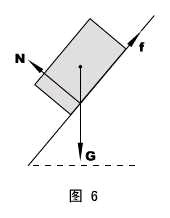
2、如图6所示,光滑斜面倾角为θ,在水平地面上加速运动。斜面上用一条与斜面平行的细绳系一质量为m的小球,当斜面加速度为a时(a<ctgθ),小球能够保持相对斜面静止。试求此时绳子的张力T 。
解说:当力的个数较多,不能直接用平行四边形寻求合力时,宜用正交分解处理受力,在对应牛顿第二定律的“独立作用性”列方程。
正交坐标的选择,视解题方便程度而定。
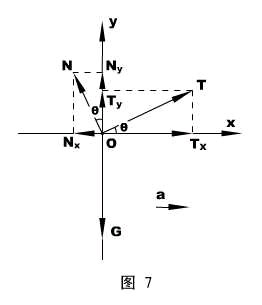
解法一:先介绍一般的思路。沿加速度a方向建x轴,与a垂直的方向上建y轴,如图7所示(N为斜面支持力)。于是可得两方程
ΣFx = ma ,即Tx - Nx = ma
ΣFy = 0 , 即Ty + Ny = mg
代入方位角θ,以上两式成为
T cosθ-N sinθ = ma (1)
T sinθ + Ncosθ = mg (2)
这是一个关于T和N的方程组,解(1)(2)两式得:T = mgsinθ + ma cosθ
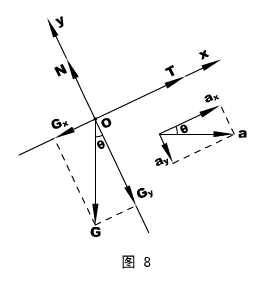
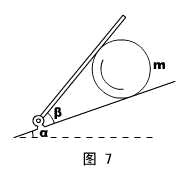
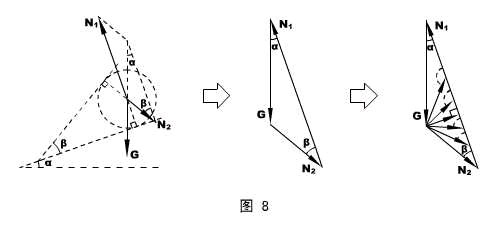
解法二:下面尝试一下能否独立地解张力T 。将正交分解的坐标选择为:x——斜面方向,y——和斜面垂直的方向。这时,在分解受力时,只分解重力G就行了,但值得注意,加速度a不在任何一个坐标轴上,是需要分解的。矢量分解后,如图8所示。
根据独立作用性原理,ΣFx = max
即:T - Gx = max
即:T - mg sinθ = m acosθ
显然,独立解T值是成功的。结果与解法一相同。
答案:mgsinθ + ma cosθ
思考:当a>ctgθ时,张力T的结果会变化吗?(从支持力的结果N = mgcosθ-ma sinθ看小球脱离斜面的条件,求脱离斜面后,θ条件已没有意义。答:T = m![]() 。)
。)
学生活动:用正交分解法解本节第2题“进阶练习2”
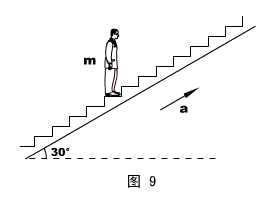
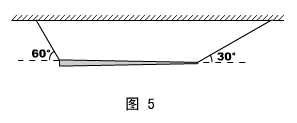
进阶练习:如图9所示,自动扶梯与地面的夹角为30°,但扶梯的台阶是水平的。当扶梯以a = 4m/s2的加速度向上运动时,站在扶梯上质量为60kg的人相对扶梯静止。重力加速度g = 10 m/s2,试求扶梯对人的静摩擦力f 。
解:这是一个展示独立作用性原理的经典例题,建议学生选择两种坐标(一种是沿a方向和垂直a方向,另一种是水平和竖直方向),对比解题过程,进而充分领会用牛顿第二定律解题的灵活性。
答:208N 。
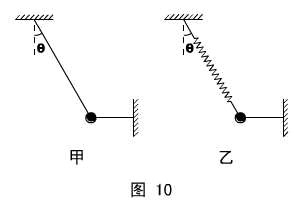
3、如图10所示,甲图系着小球的是两根轻绳,乙图系着小球的是一根轻弹簧和轻绳,方位角θ已知。现将它们的水平绳剪断,试求:在剪断瞬间,两种情形下小球的瞬时加速度。
解说:第一步,阐明绳子弹力和弹簧弹力的区别。
(学生活动)思考:用竖直的绳和弹簧悬吊小球,并用竖直向下的力拉住小球静止,然后同时释放,会有什么现象?原因是什么?
结论——绳子的弹力可以突变而弹簧的弹力不能突变(胡克定律)。
第二步,在本例中,突破“绳子的拉力如何瞬时调节”这一难点(从即将开始的运动来反推)。
知识点,牛顿第二定律的瞬时性。
答案:a甲 = gsinθ ;a乙 = gtgθ 。
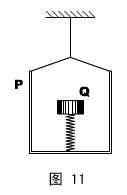
应用:如图11所示,吊篮P挂在天花板上,与吊篮质量相等的物体Q被固定在吊篮中的轻弹簧托住,当悬挂吊篮的细绳被烧断瞬间,P、Q的加速度分别是多少?
解:略。
答:2g ;0 。
三、牛顿第二、第三定律的应用
要点:在动力学问题中,如果遇到几个研究对象时,就会面临如何处理对象之间的力和对象与外界之间的力问题,这时有必要引进“系统”、“内力”和“外力”等概念,并适时地运用牛顿第三定律。
在方法的选择方面,则有“隔离法”和“整体法”。前者是根本,后者有局限,也有难度,但常常使解题过程简化,使过程的物理意义更加明晰。
对N个对象,有N个隔离方程和一个(可能的)整体方程,这(N + 1)个方程中必有一个是通解方程,如何取舍,视解题方便程度而定。
补充:当多个对象不具有共同的加速度时,一般来讲,整体法不可用,但也有一种特殊的“整体方程”,可以不受这个局限(可以介绍推导过程)——
Σ![]() = m1
= m1![]() + m2
+ m2![]() + m3
+ m3![]() + … + mn
+ … + mn![]()
其中Σ![]() 只能是系统外力的矢量和,等式右边也是矢量相加。
只能是系统外力的矢量和,等式右边也是矢量相加。
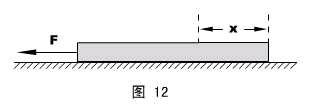
1、如图12所示,光滑水平面上放着一个长为L的均质直棒,现给棒一个沿棒方向的、大小为F的水平恒力作用,则棒中各部位的张力T随图中x的关系怎样?
解说:截取隔离对象,列整体方程和隔离方程(隔离右段较好)。
答案:N = ![]() x 。
x 。
思考:如果水平面粗糙,结论又如何?
解:分两种情况,(1)能拉动;(2)不能拉动。
第(1)情况的计算和原题基本相同,只是多了一个摩擦力的处理,结论的化简也麻烦一些。
第(2)情况可设棒的总质量为M ,和水平面的摩擦因素为μ,而F = μ![]() Mg ,其中l<L ,则x<(L-l)的右段没有张力,x>(L-l)的左端才有张力。
Mg ,其中l<L ,则x<(L-l)的右段没有张力,x>(L-l)的左端才有张力。
答:若棒仍能被拉动,结论不变。
若棒不能被拉动,且F = μ![]() Mg时(μ为棒与平面的摩擦因素,l为小于L的某一值,M为棒的总质量),当x<(L-l),N≡0 ;当x>(L-l),N =
Mg时(μ为棒与平面的摩擦因素,l为小于L的某一值,M为棒的总质量),当x<(L-l),N≡0 ;当x>(L-l),N = ![]() 〔x -〈L-l〉〕。
〔x -〈L-l〉〕。
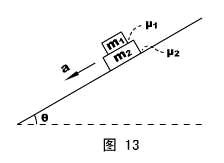
应用:如图13所示,在倾角为θ的固定斜面上,叠放着两个长方体滑块,它们的质量分别为m1和m2 ,它们之间的摩擦因素、和斜面的摩擦因素分别为μ1和μ2 ,系统释放后能够一起加速下滑,则它们之间的摩擦力大小为:
A、μ1 m1gcosθ ; B、μ2 m1gcosθ ;
C、μ1 m2gcosθ ; D、μ1 m2gcosθ ;
解:略。
答:B 。(方向沿斜面向上。)
思考:(1)如果两滑块不是下滑,而是以初速度v0一起上冲,以上结论会变吗?(2)如果斜面光滑,两滑块之间有没有摩擦力?(3)如果将下面的滑块换成如图14所示的盒子,上面的滑块换成小球,它们以初速度v0一起上冲,球应对盒子的哪一侧内壁有压力?
解:略。
答:(1)不会;(2)没有;(3)若斜面光滑,对两内壁均无压力,若斜面粗糙,对斜面上方的内壁有压力。
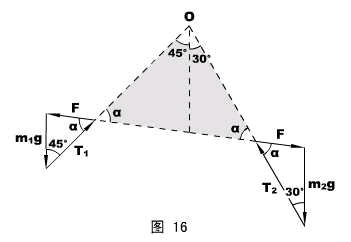
2、如图15所示,三个物体质量分别为m1 、m2和m3 ,带滑轮的物体放在光滑水平面上,滑轮和所有接触面的摩擦均不计,绳子的质量也不计,为使三个物体无相对滑动,水平推力F应为多少?
解说:
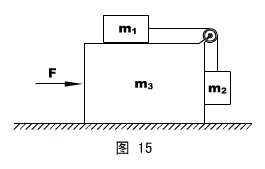
此题对象虽然有三个,但难度不大。隔离m2 ,竖直方向有一个平衡方程;隔离m1 ,水平方向有一个动力学方程;整体有一个动力学方程。就足以解题了。
答案:F = ![]() 。
。
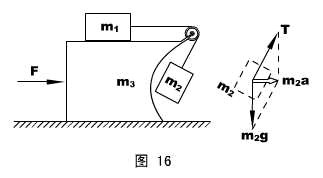
思考:若将质量为m3物体右边挖成凹形,让m2可以自由摆动(而不与m3相碰),如图16所示,其它条件不变。是否可以选择一个恰当的F′,使三者无相对运动?如果没有,说明理由;如果有,求出这个F′的值。
解:此时,m2的隔离方程将较为复杂。设绳子张力为T ,m2的受力情况如图,隔离方程为:
![]() = m2a
= m2a
隔离m1 ,仍有:T = m1a
解以上两式,可得:a =  g
g
最后用整体法解F即可。
答:当m1 ≤ m2时,没有适应题意的F′;当m1 > m2时,适应题意的F′=  。
。
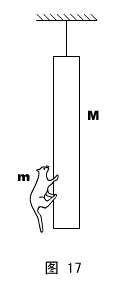
3、一根质量为M的木棒,上端用细绳系在天花板上,棒上有一质量为m的猫,如图17所示。现将系木棒的绳子剪断,同时猫相对棒往上爬,但要求猫对地的高度不变,则棒的加速度将是多少?
解说:法一,隔离法。需要设出猫爪抓棒的力f ,然后列猫的平衡方程和棒的动力学方程,解方程组即可。
法二,“新整体法”。
据Σ![]() = m1
= m1![]() + m2
+ m2![]() + m3
+ m3![]() + … + mn
+ … + mn![]() ,猫和棒的系统外力只有两者的重力,竖直向下,而猫的加速度a1 = 0 ,所以:
,猫和棒的系统外力只有两者的重力,竖直向下,而猫的加速度a1 = 0 ,所以:
( M + m )g = m·0 + M a1
解棒的加速度a1十分容易。
答案:![]() g 。
g 。
四、特殊的连接体
当系统中各个体的加速度不相等时,经典的整体法不可用。如果各个体的加速度不在一条直线上,“新整体法”也将有一定的困难(矢量求和不易)。此时,我们回到隔离法,且要更加注意找各参量之间的联系。
解题思想:抓某个方向上加速度关系。方法:“微元法”先看位移关系,再推加速度关系。、
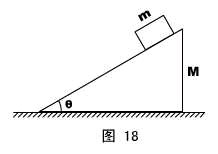
1、如图18所示,一质量为M 、倾角为θ的光滑斜面,放置在光滑的水平面上,另一个质量为m的滑块从斜面顶端释放,试求斜面的加速度。
解说:本题涉及两个物体,它们的加速度关系复杂,但在垂直斜面方向上,大小是相等的。对两者列隔离方程时,务必在这个方向上进行突破。
(学生活动)定型判断斜面的运动情况、滑块的运动情况。
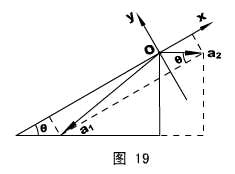
位移矢量示意图如图19所示。根据运动学规律,加速度矢量a1和a2也具有这样的关系。
(学生活动)这两个加速度矢量有什么关系?
沿斜面方向、垂直斜面方向建x 、y坐标,可得:
a1y = a2y ①
且:a1y = a2sinθ ②
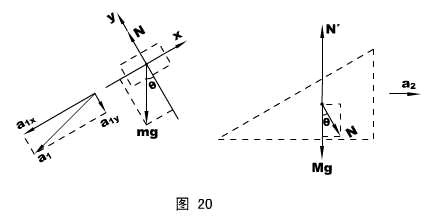
隔离滑块和斜面,受力图如图20所示。
对滑块,列y方向隔离方程,有:
mgcosθ- N = ma1y ③
对斜面,仍沿合加速度a2方向列方程,有:
Nsinθ= Ma2 ④
解①②③④式即可得a2 。
答案:a2 = ![]() 。
。
(学生活动)思考:如何求a1的值?
解:a1y已可以通过解上面的方程组求出;a1x只要看滑块的受力图,列x方向的隔离方程即可,显然有mgsinθ= ma1x ,得:a1x = gsinθ 。最后据a1 = ![]() 求a1 。
求a1 。
答:a1 = ![]() 。
。
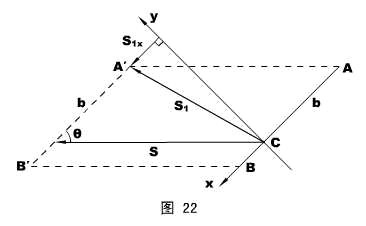
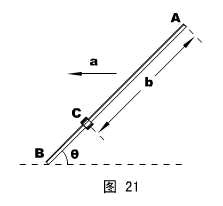
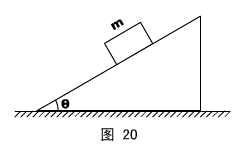
2、如图21所示,与水平面成θ角的AB棒上有一滑套C ,可以无摩擦地在棒上滑动,开始时与棒的A端相距b ,相对棒静止。当棒保持倾角θ不变地沿水平面匀加速运动,加速度为a(且a>gtgθ)时,求滑套C从棒的A端滑出所经历的时间。
解说:这是一个比较特殊的“连接体问题”,寻求运动学参量的关系似乎比动力学分析更加重要。动力学方面,只需要隔离滑套C就行了。
(学生活动)思考:为什么题意要求a>gtgθ?(联系本讲第二节第1题之“思考题”)
定性绘出符合题意的运动过程图,如图22所示:S表示棒的位移,S1表示滑套的位移。沿棒与垂直棒建直角坐标后,S1x表示S1在x方向上的分量。不难看出:
S1x + b = S cosθ ①
设全程时间为t ,则有:
S = ![]() at2 ②
at2 ②
S1x = ![]() a1xt2 ③
a1xt2 ③
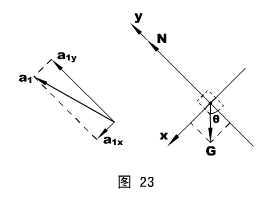
而隔离滑套,受力图如图23所示,显然:
mgsinθ= ma1x ④
解①②③④式即可。
答案:t = ![]()
另解:如果引进动力学在非惯性系中的修正式 Σ![]() +
+ ![]() * = m
* = m ![]() (注:
(注:![]() *为惯性力),此题极简单。过程如下——
*为惯性力),此题极简单。过程如下——
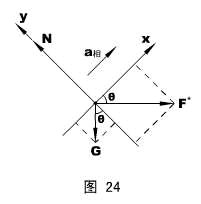
以棒为参照,隔离滑套,分析受力,如图24所示。
注意,滑套相对棒的加速度a相是沿棒向上的,故动力学方程为:
F*cosθ- mgsinθ= ma相 (1)
其中F* = ma (2)
而且,以棒为参照,滑套的相对位移S相就是b ,即:
b = S相 = ![]() a相 t2 (3)
a相 t2 (3)
解(1)(2)(3)式就可以了。
第二讲 配套例题选讲
教材范本:龚霞玲主编《奥林匹克物理思维训练教材》,知识出版社,2002年8月第一版。
例题选讲针对“教材”第三章的部分例题和习题。
查看习题详情和答案>>第一部分 力&物体的平衡
第一讲 力的处理
一、矢量的运算
1、加法
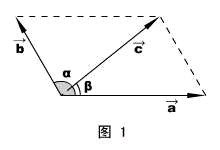
表达:![]() +
+ ![]() =
= ![]() 。
。
名词:![]() 为“和矢量”。
为“和矢量”。
法则:平行四边形法则。如图1所示。
和矢量大小:c = ![]() ,其中α为
,其中α为![]() 和
和![]() 的夹角。
的夹角。
和矢量方向:![]() 在
在![]() 、
、![]() 之间,和
之间,和![]() 夹角β= arcsin
夹角β= arcsin![]()
2、减法
表达:![]() =
= ![]() -
-![]() 。
。
名词:![]() 为“被减数矢量”,
为“被减数矢量”,![]() 为“减数矢量”,
为“减数矢量”,![]() 为“差矢量”。
为“差矢量”。
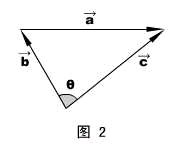
法则:三角形法则。如图2所示。将被减数矢量和减数矢量的起始端平移到一点,然后连接两时量末端,指向被减数时量的时量,即是差矢量。
差矢量大小:a = ![]() ,其中θ为
,其中θ为![]() 和
和![]() 的夹角。
的夹角。
差矢量的方向可以用正弦定理求得。
一条直线上的矢量运算是平行四边形和三角形法则的特例。
例题:已知质点做匀速率圆周运动,半径为R ,周期为T ,求它在![]() T内和在
T内和在![]() T内的平均加速度大小。
T内的平均加速度大小。
解说:如图3所示,A到B点对应![]() T的过程,A到C点对应
T的过程,A到C点对应![]() T的过程。这三点的速度矢量分别设为
T的过程。这三点的速度矢量分别设为![]() 、
、![]() 和
和![]() 。
。
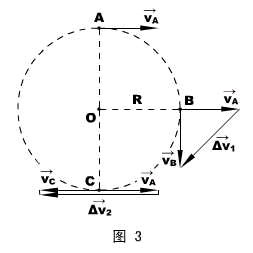
根据加速度的定义 ![]() =
= ![]() 得:
得:![]() =
= ![]() ,
,![]() =
= ![]()
由于有两处涉及矢量减法,设两个差矢量 ![]() =
= ![]() -
-![]() ,
,![]() =
= ![]() -
-![]() ,根据三角形法则,它们在图3中的大小、方向已绘出(
,根据三角形法则,它们在图3中的大小、方向已绘出(![]() 的“三角形”已被拉伸成一条直线)。
的“三角形”已被拉伸成一条直线)。
本题只关心各矢量的大小,显然:
![]() =
= ![]() =
= ![]() =
= ![]() ,且:
,且:![]() =
= ![]()
![]() =
= ![]() ,
,![]() = 2
= 2![]() =
= ![]()
所以:![]() =
= ![]() =
=  =
= ![]() ,
,![]() =
= ![]() =
= ![]() =
= ![]() 。
。
(学生活动)观察与思考:这两个加速度是否相等,匀速率圆周运动是不是匀变速运动?
答:否;不是。
3、乘法
矢量的乘法有两种:叉乘和点乘,和代数的乘法有着质的不同。
⑴ 叉乘
表达:![]() ×
×![]() =
= ![]()
名词:![]() 称“矢量的叉积”,它是一个新的矢量。
称“矢量的叉积”,它是一个新的矢量。
叉积的大小:c = absinα,其中α为![]() 和
和![]() 的夹角。意义:
的夹角。意义:![]() 的大小对应由
的大小对应由![]() 和
和![]() 作成的平行四边形的面积。
作成的平行四边形的面积。
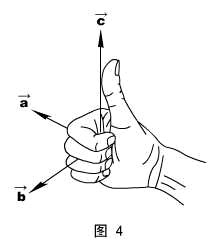
叉积的方向:垂直![]() 和
和![]() 确定的平面,并由右手螺旋定则确定方向,如图4所示。
确定的平面,并由右手螺旋定则确定方向,如图4所示。
显然,![]() ×
×![]() ≠
≠![]() ×
×![]() ,但有:
,但有:![]() ×
×![]() = -
= -![]() ×
×![]()
⑵ 点乘
表达:![]() ·
·![]() = c
= c
名词:c称“矢量的点积”,它不再是一个矢量,而是一个标量。
点积的大小:c = abcosα,其中α为![]() 和
和![]() 的夹角。
的夹角。
二、共点力的合成
1、平行四边形法则与矢量表达式
2、一般平行四边形的合力与分力的求法
余弦定理(或分割成RtΔ)解合力的大小
正弦定理解方向
三、力的分解
1、按效果分解
2、按需要——正交分解
第二讲 物体的平衡
一、共点力平衡
1、特征:质心无加速度。
2、条件:Σ![]() = 0 ,或
= 0 ,或 ![]() = 0 ,
= 0 ,![]() = 0
= 0
例题:如图5所示,长为L 、粗细不均匀的横杆被两根轻绳水平悬挂,绳子与水平方向的夹角在图上已标示,求横杆的重心位置。
解说:直接用三力共点的知识解题,几何关系比较简单。
答案:距棒的左端L/4处。
(学生活动)思考:放在斜面上的均质长方体,按实际情况分析受力,斜面的支持力会通过长方体的重心吗?
解:将各处的支持力归纳成一个N ,则长方体受三个力(G 、f 、N)必共点,由此推知,N不可能通过长方体的重心。正确受力情形如图6所示(通常的受力图是将受力物体看成一个点,这时,N就过重心了)。
答:不会。
二、转动平衡
1、特征:物体无转动加速度。
2、条件:Σ![]() = 0 ,或ΣM+ =ΣM-
= 0 ,或ΣM+ =ΣM-
如果物体静止,肯定会同时满足两种平衡,因此用两种思路均可解题。
3、非共点力的合成
大小和方向:遵从一条直线矢量合成法则。
作用点:先假定一个等效作用点,然后让所有的平行力对这个作用点的和力矩为零。
第三讲 习题课
1、如图7所示,在固定的、倾角为α斜面上,有一块可以转动的夹板(β不定),夹板和斜面夹着一个质量为m的光滑均质球体,试求:β取何值时,夹板对球的弹力最小。
解说:法一,平行四边形动态处理。
对球体进行受力分析,然后对平行四边形中的矢量G和N1进行平移,使它们构成一个三角形,如图8的左图和中图所示。
由于G的大小和方向均不变,而N1的方向不可变,当β增大导致N2的方向改变时,N2的变化和N1的方向变化如图8的右图所示。
显然,随着β增大,N1单调减小,而N2的大小先减小后增大,当N2垂直N1时,N2取极小值,且N2min = Gsinα。
法二,函数法。
看图8的中间图,对这个三角形用正弦定理,有:
![]() =
= ![]() ,即:N2 =
,即:N2 = ![]() ,β在0到180°之间取值,N2的极值讨论是很容易的。
,β在0到180°之间取值,N2的极值讨论是很容易的。
答案:当β= 90°时,甲板的弹力最小。
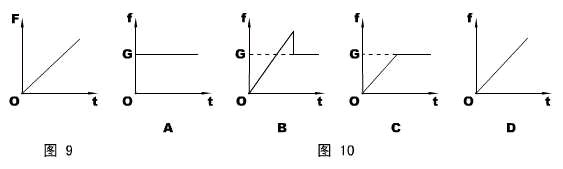
2、把一个重为G的物体用一个水平推力F压在竖直的足够高的墙壁上,F随时间t的变化规律如图9所示,则在t = 0开始物体所受的摩擦力f的变化图线是图10中的哪一个?
解说:静力学旨在解决静态问题和准静态过程的问题,但本题是一个例外。物体在竖直方向的运动先加速后减速,平衡方程不再适用。如何避开牛顿第二定律,是本题授课时的难点。
静力学的知识,本题在于区分两种摩擦的不同判据。
水平方向合力为零,得:支持力N持续增大。
物体在运动时,滑动摩擦力f = μN ,必持续增大。但物体在静止后静摩擦力f′≡ G ,与N没有关系。
对运动过程加以分析,物体必有加速和减速两个过程。据物理常识,加速时,f < G ,而在减速时f > G 。
答案:B 。
3、如图11所示,一个重量为G的小球套在竖直放置的、半径为R的光滑大环上,另一轻质弹簧的劲度系数为k ,自由长度为L(L<2R),一端固定在大圆环的顶点A ,另一端与小球相连。环静止平衡时位于大环上的B点。试求弹簧与竖直方向的夹角θ。
解说:平行四边形的三个矢量总是可以平移到一个三角形中去讨论,解三角形的典型思路有三种:①分割成直角三角形(或本来就是直角三角形);②利用正、余弦定理;③利用力学矢量三角形和某空间位置三角形相似。本题旨在贯彻第三种思路。
分析小球受力→矢量平移,如图12所示,其中F表示弹簧弹力,N表示大环的支持力。
(学生活动)思考:支持力N可不可以沿图12中的反方向?(正交分解看水平方向平衡——不可以。)
容易判断,图中的灰色矢量三角形和空间位置三角形ΔAOB是相似的,所以:
![]() ⑴
⑴
由胡克定律:F = k(![]() - R) ⑵
- R) ⑵
几何关系:![]() = 2Rcosθ ⑶
= 2Rcosθ ⑶
解以上三式即可。

答案:arccos![]() 。
。
(学生活动)思考:若将弹簧换成劲度系数k′较大的弹簧,其它条件不变,则弹簧弹力怎么变?环的支持力怎么变?
答:变小;不变。
(学生活动)反馈练习:光滑半球固定在水平面上,球心O的正上方有一定滑轮,一根轻绳跨过滑轮将一小球从图13所示的A位置开始缓慢拉至B位置。试判断:在此过程中,绳子的拉力T和球面支持力N怎样变化?
解:和上题完全相同。
答:T变小,N不变。
4、如图14所示,一个半径为R的非均质圆球,其重心不在球心O点,先将它置于水平地面上,平衡时球面上的A点和地面接触;再将它置于倾角为30°的粗糙斜面上,平衡时球面上的B点与斜面接触,已知A到B的圆心角也为30°。试求球体的重心C到球心O的距离。
解说:练习三力共点的应用。
根据在平面上的平衡,可知重心C在OA连线上。根据在斜面上的平衡,支持力、重力和静摩擦力共点,可以画出重心的具体位置。几何计算比较简单。
答案:![]() R 。
R 。
(学生活动)反馈练习:静摩擦足够,将长为a 、厚为b的砖块码在倾角为θ的斜面上,最多能码多少块?
解:三力共点知识应用。
答:![]() 。
。
4、两根等长的细线,一端拴在同一悬点O上,另一端各系一个小球,两球的质量分别为m1和m2 ,已知两球间存在大小相等、方向相反的斥力而使两线张开一定角度,分别为45和30°,如图15所示。则m1 : m2??为多少?
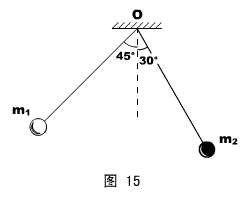
解说:本题考查正弦定理、或力矩平衡解静力学问题。
对两球进行受力分析,并进行矢量平移,如图16所示。
首先注意,图16中的灰色三角形是等腰三角形,两底角相等,设为α。
而且,两球相互作用的斥力方向相反,大小相等,可用同一字母表示,设为F 。
对左边的矢量三角形用正弦定理,有:
![]() =
= ![]() ①
①
同理,对右边的矢量三角形,有:![]() =
= ![]() ②
②
解①②两式即可。
答案:1 :![]() 。
。
(学生活动)思考:解本题是否还有其它的方法?
答:有——将模型看成用轻杆连成的两小球,而将O点看成转轴,两球的重力对O的力矩必然是平衡的。这种方法更直接、简便。
应用:若原题中绳长不等,而是l1 :l2 = 3 :2 ,其它条件不变,m1与m2的比值又将是多少?
解:此时用共点力平衡更加复杂(多一个正弦定理方程),而用力矩平衡则几乎和“思考”完全相同。
答:2 :3![]() 。
。
5、如图17所示,一个半径为R的均质金属球上固定着一根长为L的轻质细杆,细杆的左端用铰链与墙壁相连,球下边垫上一块木板后,细杆恰好水平,而木板下面是光滑的水平面。由于金属球和木板之间有摩擦(已知摩擦因素为μ),所以要将木板从球下面向右抽出时,至少需要大小为F的水平拉力。试问:现要将木板继续向左插进一些,至少需要多大的水平推力?
解说:这是一个典型的力矩平衡的例题。
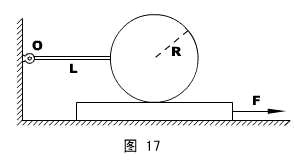
以球和杆为对象,研究其对转轴O的转动平衡,设木板拉出时给球体的摩擦力为f ,支持力为N ,重力为G ,力矩平衡方程为:
f R + N(R + L)= G(R + L) ①
球和板已相对滑动,故:f = μN ②
解①②可得:f = ![]()
再看木板的平衡,F = f 。
同理,木板插进去时,球体和木板之间的摩擦f′= ![]() = F′。
= F′。
答案:![]() 。
。
第四讲 摩擦角及其它
一、摩擦角
1、全反力:接触面给物体的摩擦力与支持力的合力称全反力,一般用R表示,亦称接触反力。
2、摩擦角:全反力与支持力的最大夹角称摩擦角,一般用φm表示。
此时,要么物体已经滑动,必有:φm = arctgμ(μ为动摩擦因素),称动摩擦力角;要么物体达到最大运动趋势,必有:φms = arctgμs(μs为静摩擦因素),称静摩擦角。通常处理为φm = φms 。
3、引入全反力和摩擦角的意义:使分析处理物体受力时更方便、更简捷。
二、隔离法与整体法
1、隔离法:当物体对象有两个或两个以上时,有必要各个击破,逐个讲每个个体隔离开来分析处理,称隔离法。
在处理各隔离方程之间的联系时,应注意相互作用力的大小和方向关系。
2、整体法:当各个体均处于平衡状态时,我们可以不顾个体的差异而讲多个对象看成一个整体进行分析处理,称整体法。
应用整体法时应注意“系统”、“内力”和“外力”的涵义。
三、应用
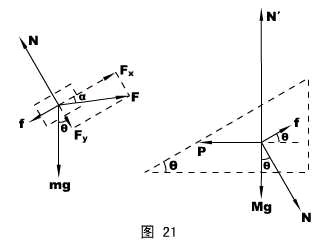
1、物体放在水平面上,用与水平方向成30°的力拉物体时,物体匀速前进。若此力大小不变,改为沿水平方向拉物体,物体仍能匀速前进,求物体与水平面之间的动摩擦因素μ。
解说:这是一个能显示摩擦角解题优越性的题目。可以通过不同解法的比较让学生留下深刻印象。
法一,正交分解。(学生分析受力→列方程→得结果。)
法二,用摩擦角解题。
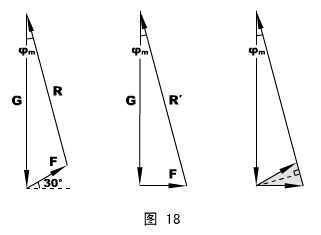
引进全反力R ,对物体两个平衡状态进行受力分析,再进行矢量平移,得到图18中的左图和中间图(注意:重力G是不变的,而全反力R的方向不变、F的大小不变),φm指摩擦角。
再将两图重叠成图18的右图。由于灰色的三角形是一个顶角为30°的等腰三角形,其顶角的角平分线必垂直底边……故有:φm = 15°。
最后,μ= tgφm 。
答案:0.268 。
(学生活动)思考:如果F的大小是可以选择的,那么能维持物体匀速前进的最小F值是多少?
解:见图18,右图中虚线的长度即Fmin ,所以,Fmin = Gsinφm 。
答:Gsin15°(其中G为物体的重量)。
2、如图19所示,质量m = 5kg的物体置于一粗糙斜面上,并用一平行斜面的、大小F = 30N的推力推物体,使物体能够沿斜面向上匀速运动,而斜面体始终静止。已知斜面的质量M = 10kg ,倾角为30°,重力加速度g = 10m/s2 ,求地面对斜面体的摩擦力大小。
解说:
本题旨在显示整体法的解题的优越性。
法一,隔离法。简要介绍……
法二,整体法。注意,滑块和斜面随有相对运动,但从平衡的角度看,它们是完全等价的,可以看成一个整体。
做整体的受力分析时,内力不加考虑。受力分析比较简单,列水平方向平衡方程很容易解地面摩擦力。
答案:26.0N 。
(学生活动)地面给斜面体的支持力是多少?
解:略。
答:135N 。
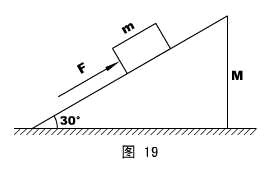
应用:如图20所示,一上表面粗糙的斜面体上放在光滑的水平地面上,斜面的倾角为θ。另一质量为m的滑块恰好能沿斜面匀速下滑。若用一推力F作用在滑块上,使之能沿斜面匀速上滑,且要求斜面体静止不动,就必须施加一个大小为P = 4mgsinθcosθ的水平推力作用于斜面体。使满足题意的这个F的大小和方向。
解说:这是一道难度较大的静力学题,可以动用一切可能的工具解题。
法一:隔离法。
由第一个物理情景易得,斜面于滑块的摩擦因素μ= tgθ
对第二个物理情景,分别隔离滑块和斜面体分析受力,并将F沿斜面、垂直斜面分解成Fx和Fy ,滑块与斜面之间的两对相互作用力只用两个字母表示(N表示正压力和弹力,f表示摩擦力),如图21所示。
对滑块,我们可以考查沿斜面方向和垂直斜面方向的平衡——
Fx = f + mgsinθ
Fy + mgcosθ= N
且 f = μN = Ntgθ
综合以上三式得到:
Fx = Fytgθ+ 2mgsinθ ①
对斜面体,只看水平方向平衡就行了——
P = fcosθ+ Nsinθ
即:4mgsinθcosθ=μNcosθ+ Nsinθ
代入μ值,化简得:Fy = mgcosθ ②
②代入①可得:Fx = 3mgsinθ
最后由F =![]() 解F的大小,由tgα=
解F的大小,由tgα= ![]() 解F的方向(设α为F和斜面的夹角)。
解F的方向(设α为F和斜面的夹角)。
答案:大小为F = mg![]() ,方向和斜面夹角α= arctg(
,方向和斜面夹角α= arctg(![]() )指向斜面内部。
)指向斜面内部。
法二:引入摩擦角和整体法观念。
仍然沿用“法一”中关于F的方向设置(见图21中的α角)。
先看整体的水平方向平衡,有:Fcos(θ- α) = P ⑴
再隔离滑块,分析受力时引进全反力R和摩擦角φ,由于简化后只有三个力(R、mg和F),可以将矢量平移后构成一个三角形,如图22所示。
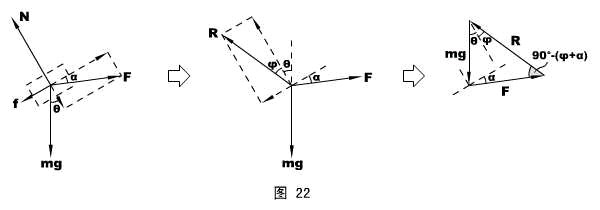
在图22右边的矢量三角形中,有:![]() =
= ![]() =
= ![]() ⑵
⑵
注意:φ= arctgμ= arctg(tgθ) = θ ⑶
解⑴⑵⑶式可得F和α的值。
查看习题详情和答案>>