摘要:16.在水平直轨道上放置一门质量为M的炮车.炮管与轨道平行.当质量为m的炮弹相对地面以速度v沿水平方向射出时.炮车的反冲速度是
网址:http://m.1010jiajiao.com/timu_id_1088060[举报]
在水平直轨道上放置一门质量为M的炮车(不包括炮弹),炮管与路轨平行。当质量为m的炮弹相对地面以速度v沿水平方向射出时,炮车的反冲速度(相对地面)是
A.-mv/(m+M) B.-mv/(M - m) C.-mv/M D.以上都不对高考 查看习题详情和答案>>在实验室中,两组同学分别探究合力一定时,物体的加速度与质量之间的关系.

(1)甲组同学使用DIS(位移传感器、数据采集器、计算机)装置进行实验,如图1所示,①是固定在小车上位移传感器的发射器部分,②是接收部分.在该实验中采用控制变量法,保持小车所受拉力不变,用钩码所受的重力作为小车所受拉力,利用图示装置,改变小车的质量,多次重复测量.在某次实验中根据测得的多组数据可画出a-1/M关系图线.
①如果摩擦力不能忽略,则画出的a-1/M图线为图2中的
②该实验中某同学画出的图线中AB段明显偏离直线,如图3所示,造成此误差的主要原因是
A.小车与轨道之间存在摩擦
B.导轨保持了水平状态
C.所挂钩码的总质量太大
D.所用小车的质量太大
(2)乙组同学利用如图甲所示的气垫导轨实验装置来进行实验.
①做实验时,将滑块从图甲所示位置由静止释放,由数字计时器(图中未画出)可读出遮光条通过光电门1、2的时间分别为△t1、△t2;用刻度尺测得两个光电门中心之间的距离x,用游标卡尺测得遮光条宽度d.则滑块经过光电门1时的速度表达式v1=
;经过光电门2时的速度表达式v2=
,滑块加速度的表达式a=
.(以上表达式均用已知字母表示).
②为了保持滑块所受的合力不变,可改变滑块质量M和气垫导轨右端高度h,如图4所示.关于“改变滑块质量M和气垫导轨右端的高度h”的正确操作方法是
A.M增大时,h增大,以保持二者乘积增大
B.M增大时,h减小,以保持二者乘积不变
C.M减小时,h增大,以保持二者乘积不变
D.M减小时,h减小,以保持二者乘积减小.
查看习题详情和答案>>
(1)甲组同学使用DIS(位移传感器、数据采集器、计算机)装置进行实验,如图1所示,①是固定在小车上位移传感器的发射器部分,②是接收部分.在该实验中采用控制变量法,保持小车所受拉力不变,用钩码所受的重力作为小车所受拉力,利用图示装置,改变小车的质量,多次重复测量.在某次实验中根据测得的多组数据可画出a-1/M关系图线.
①如果摩擦力不能忽略,则画出的a-1/M图线为图2中的
丙
丙
.(填“甲”或“乙”或“丙”)②该实验中某同学画出的图线中AB段明显偏离直线,如图3所示,造成此误差的主要原因是
C
C
A.小车与轨道之间存在摩擦
B.导轨保持了水平状态
C.所挂钩码的总质量太大
D.所用小车的质量太大
(2)乙组同学利用如图甲所示的气垫导轨实验装置来进行实验.
①做实验时,将滑块从图甲所示位置由静止释放,由数字计时器(图中未画出)可读出遮光条通过光电门1、2的时间分别为△t1、△t2;用刻度尺测得两个光电门中心之间的距离x,用游标卡尺测得遮光条宽度d.则滑块经过光电门1时的速度表达式v1=
| d |
| △t1 |
| d |
| △t1 |
| d |
| △t2 |
| d |
| △t2 |
(
| ||||
| 2x |
(
| ||||
| 2x |
②为了保持滑块所受的合力不变,可改变滑块质量M和气垫导轨右端高度h,如图4所示.关于“改变滑块质量M和气垫导轨右端的高度h”的正确操作方法是
BC
BC
.A.M增大时,h增大,以保持二者乘积增大
B.M增大时,h减小,以保持二者乘积不变
C.M减小时,h增大,以保持二者乘积不变
D.M减小时,h减小,以保持二者乘积减小.
在实验室中,两组同学分别探究合力一定时,物体的加速度与质量之间的关系.

(1)甲组同学使用DIS(位移传感器、数据采集器、计算机)装置进行实验,如图1所示,①是固定在小车上位移传感器的发射器部分,②是接收部分.在该实验中采用控制变量法,保持小车所受拉力不变,用钩码所受的重力作为小车所受拉力,利用图示装置,改变小车的质量,多次重复测量.在某次实验中根据测得的多组数据可画出a-1/M关系图线.
①如果摩擦力不能忽略,则画出的a-1/M图线为图2中的______.(填“甲”或“乙”或“丙”)
②该实验中某同学画出的图线中AB段明显偏离直线,如图3所示,造成此误差的主要原因是______
A.小车与轨道之间存在摩擦
B.导轨保持了水平状态
C.所挂钩码的总质量太大
D.所用小车的质量太大
(2)乙组同学利用如图甲所示的气垫导轨实验装置来进行实验.
①做实验时,将滑块从图甲所示位置由静止释放,由数字计时器(图中未画出)可读出遮光条通过光电门1、2的时间分别为△t1、△t2;用刻度尺测得两个光电门中心之间的距离x,用游标卡尺测得遮光条宽度d.则滑块经过光电门1时的速度表达式v1=______;经过光电门2时的速度表达式v2=______,滑块加速度的表达式a=______.(以上表达式均用已知字母表示).
②为了保持滑块所受的合力不变,可改变滑块质量M和气垫导轨右端高度h,如图4所示.关于“改变滑块质量M和气垫导轨右端的高度h”的正确操作方法是______.
A.M增大时,h增大,以保持二者乘积增大
B.M增大时,h减小,以保持二者乘积不变
C.M减小时,h增大,以保持二者乘积不变
D.M减小时,h减小,以保持二者乘积减小.
查看习题详情和答案>>
在实验室中,两组同学分别探究合力一定时,物体的加速度与质量之间的关系.

(1)甲组同学使用DIS(位移传感器、数据采集器、计算机)装置进行实验,如图1所示,①是固定在小车上位移传感器的发射器部分,②是接收部分.在该实验中采用控制变量法,保持小车所受拉力不变,用钩码所受的重力作为小车所受拉力,利用图示装置,改变小车的质量,多次重复测量.在某次实验中根据测得的多组数据可画出a-1/M关系图线.
①如果摩擦力不能忽略,则画出的a-1/M图线为图2中的______.(填“甲”或“乙”或“丙”)
②该实验中某同学画出的图线中AB段明显偏离直线,如图3所示,造成此误差的主要原因是______
A.小车与轨道之间存在摩擦
B.导轨保持了水平状态
C.所挂钩码的总质量太大
D.所用小车的质量太大
(2)乙组同学利用如图甲所示的气垫导轨实验装置来进行实验.
①做实验时,将滑块从图甲所示位置由静止释放,由数字计时器(图中未画出)可读出遮光条通过光电门1、2的时间分别为△t1、△t2;用刻度尺测得两个光电门中心之间的距离x,用游标卡尺测得遮光条宽度d.则滑块经过光电门1时的速度表达式v1=______;经过光电门2时的速度表达式v2=______,滑块加速度的表达式a=______.(以上表达式均用已知字母表示).
②为了保持滑块所受的合力不变,可改变滑块质量M和气垫导轨右端高度h,如图4所示.关于“改变滑块质量M和气垫导轨右端的高度h”的正确操作方法是______.
A.M增大时,h增大,以保持二者乘积增大
B.M增大时,h减小,以保持二者乘积不变
C.M减小时,h增大,以保持二者乘积不变
D.M减小时,h减小,以保持二者乘积减小.
查看习题详情和答案>>
(1)甲组同学使用DIS(位移传感器、数据采集器、计算机)装置进行实验,如图1所示,①是固定在小车上位移传感器的发射器部分,②是接收部分.在该实验中采用控制变量法,保持小车所受拉力不变,用钩码所受的重力作为小车所受拉力,利用图示装置,改变小车的质量,多次重复测量.在某次实验中根据测得的多组数据可画出a-1/M关系图线.
①如果摩擦力不能忽略,则画出的a-1/M图线为图2中的______.(填“甲”或“乙”或“丙”)
②该实验中某同学画出的图线中AB段明显偏离直线,如图3所示,造成此误差的主要原因是______
A.小车与轨道之间存在摩擦
B.导轨保持了水平状态
C.所挂钩码的总质量太大
D.所用小车的质量太大
(2)乙组同学利用如图甲所示的气垫导轨实验装置来进行实验.
①做实验时,将滑块从图甲所示位置由静止释放,由数字计时器(图中未画出)可读出遮光条通过光电门1、2的时间分别为△t1、△t2;用刻度尺测得两个光电门中心之间的距离x,用游标卡尺测得遮光条宽度d.则滑块经过光电门1时的速度表达式v1=______;经过光电门2时的速度表达式v2=______,滑块加速度的表达式a=______.(以上表达式均用已知字母表示).
②为了保持滑块所受的合力不变,可改变滑块质量M和气垫导轨右端高度h,如图4所示.关于“改变滑块质量M和气垫导轨右端的高度h”的正确操作方法是______.
A.M增大时,h增大,以保持二者乘积增大
B.M增大时,h减小,以保持二者乘积不变
C.M减小时,h增大,以保持二者乘积不变
D.M减小时,h减小,以保持二者乘积减小.
查看习题详情和答案>>
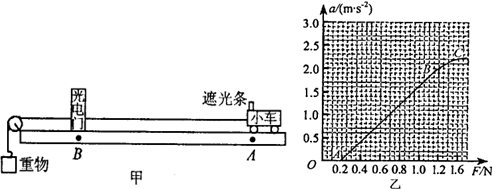
如图甲是某同学研究“小车加速度与力”的关系的实验装置,他将光电门固定在水平轨道上的B点,用不同重物通过细线拉同一小车,每次小车都从同一位置A由静止释放,测得sAB=50cm,遮光条的宽度d=1.14cm.(计算保留三位有效数字)
(1)某次实验时,由数字计时器读出遮光条通过光电门的时间t1=2.0×10-2s,则小车经过光电门时的速度v1=
(2)本次实验中小车运动的加速度a1=
(3)实验中,该同学认为细线对小车的拉力F等于重物重力的大小,改变重物的重量测出多组重物的重量和对应遮光条通过光电门的时间,计算出小车相应运动的加速度a,通过描点作出图象乙,分析图线的AB段可得出的实验结论是
(4)小车的质量M=
(5)此图线的BC段明显偏离直线,造成此误差的主要原因是
A.小车与轨道间存在摩擦B.导轨保持了水平状态
C.重物的总重量太大D.所用小车的质量太大.
查看习题详情和答案>>
(1)某次实验时,由数字计时器读出遮光条通过光电门的时间t1=2.0×10-2s,则小车经过光电门时的速度v1=
0.570
0.570
m/s;(2)本次实验中小车运动的加速度a1=
0.325
0.325
m/s2;(3)实验中,该同学认为细线对小车的拉力F等于重物重力的大小,改变重物的重量测出多组重物的重量和对应遮光条通过光电门的时间,计算出小车相应运动的加速度a,通过描点作出图象乙,分析图线的AB段可得出的实验结论是
a随F的增加线性增大
a随F的增加线性增大
;图象不通过坐标原点的原因是操作过程中没有平衡摩擦力或者平衡摩擦力不足
操作过程中没有平衡摩擦力或者平衡摩擦力不足
.(4)小车的质量M=
0.500
0.500
kg;(5)此图线的BC段明显偏离直线,造成此误差的主要原因是
C
C
.A.小车与轨道间存在摩擦B.导轨保持了水平状态
C.重物的总重量太大D.所用小车的质量太大.