摘要:28.在研究杠杆平衡条件的探究活动中. (1)在杠杆的支点两侧上挂上钩码后.发现左端比右端高.应将钩码向 ▲ 移动.使杠杆在水平位置平衡.这样的好处是 ▲ . (2)若某次操作出现如图所示情况.发现F1×OB与F2×OA两者并不相等.这是由于 ▲ .
网址:http://m.1010jiajiao.com/timu3_id_1496191[举报]
29、在研究杠杆平衡条件的探究活动中,
(1)所需的器材除了杠杆、支架、细线、钩码、刻度尺外,还需要
(2)杠杆两端的螺母的作用是
(3)在杠杆的支点两侧上挂上钩码后,发现左端比右端高,应将钩码向
(4)实验得出:杠杆平衡条件是
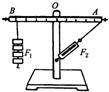
(5)若某次操作出现如图所示情况,发现F1×OB与F2×OA两者并不相等,这是由于
(6)若实验中,用下图所示的悬挂钩码方式,杠杆也能平衡,但采用这种方式是不妥当的.这主要是因为(

A、一个人无法独立操作;B、需要使用太多的钩码
C、力臂与杠杆不重合;D、力和力臂数目过多
(7)如下图用悬挂钩码方式探究杠杆平衡条件实验中,如果不改变支点O右侧所挂的两个钩码及其位置,保持左侧第

查看习题详情和答案>>
(1)所需的器材除了杠杆、支架、细线、钩码、刻度尺外,还需要
弹簧测力计
.(2)杠杆两端的螺母的作用是
实验前调节杠杆在水平位置平衡
.(3)在杠杆的支点两侧上挂上钩码后,发现左端比右端高,应将钩码向
左
移动(填“左”“右”),使杠杆在水平
位置平衡,这样的好处是便于测量力臂
.(4)实验得出:杠杆平衡条件是
动力×动力臂=阻力×阻力臂(或F1×L1=F2×L2)
.(5)若某次操作出现如图所示情况,发现F1×OB与F2×OA两者并不相等,这是由于
OA不是F2的力臂
,F1×OB小于
F2×OA.(填“大于”、“等于”或“小于”)(6)若实验中,用下图所示的悬挂钩码方式,杠杆也能平衡,但采用这种方式是不妥当的.这主要是因为(
C
)A、一个人无法独立操作;B、需要使用太多的钩码
C、力臂与杠杆不重合;D、力和力臂数目过多
(7)如下图用悬挂钩码方式探究杠杆平衡条件实验中,如果不改变支点O右侧所挂的两个钩码及其位置,保持左侧第
2
格的钩码不动,将左侧另外两个钩码改挂到它的下方,杠杆仍可以平衡.28、在研究杠杆平衡条件的探究活动中,
(1)在杠杆的支点两侧上挂上钩码后,发现左端比右端高,应将钩码向
(2)若某次操作出现如图所示情况,发现F1×OB与F2×OA两者并不相等,这是由于
查看习题详情和答案>>
(1)在杠杆的支点两侧上挂上钩码后,发现左端比右端高,应将钩码向
右
移动(左/右),使杠杆在水平位置平衡,这样的好处是便于测量力臂
.(2)若某次操作出现如图所示情况,发现F1×OB与F2×OA两者并不相等,这是由于
OA不是力臂
.28、在研究杠杆平衡条件的探究活动中,
(1)所需的器材除了杠杆、支架、细线、钩码外,还需要
(2)杠杆两端的螺母的作用是
(3)在杠杆的支点两侧上挂上钩码后,发现左端比右端高,应将钩码向
(4)实验得出:杠杆平衡条件是
(5)下表是某同学实验的过程记录,请把表格中空缺部分补充完整.
(6)若某次操作出现如图所示情况,发现F1×OB与F2×OA两者并不相等,这是由于

查看习题详情和答案>>
(1)所需的器材除了杠杆、支架、细线、钩码外,还需要
弹簧测力计
.(2)杠杆两端的螺母的作用是
调节杠杆在水平位置平衡
.(3)在杠杆的支点两侧上挂上钩码后,发现左端比右端高,应将钩码向
左
移动(填“左”或“右”),使杠杆在水平
位置平衡,这样的好处是便于测量力臂
.(4)实验得出:杠杆平衡条件是
F1L1=F2L2
.(5)下表是某同学实验的过程记录,请把表格中空缺部分补充完整.
(6)若某次操作出现如图所示情况,发现F1×OB与F2×OA两者并不相等,这是由于
OA不是F2的力臂
,F1×OB<
F2×OA.(填“>”、“<”) 在研究杠杆平衡条件的探究活动中,
在研究杠杆平衡条件的探究活动中,(1)所需的器材除了杠杆、支架、细线、钩码、测力计外,还需要
刻度尺
刻度尺
.(2)应先调节杠杆两端的平衡螺母,发现左端比右端高,应将钩码向
左
左
移动(填“左”或“右”),使杠杆在
水平
水平
位置平衡,目的是为了方便测量力臂
力臂
.(3)下表是某同学实验的过程记录,请把表格中空缺部分补充完整.
| 次数 | 动力/N | 动力臂/m | 阻力/N | 阻力臂/m |
| 1 | 2 | 0.04 | 4 | 0.02 |
| 2 | 1 | 0.06 | 2 | 0.03 |
| 3 | 3 | 0.04 | 6 |
OA不是F2的力臂
OA不是F2的力臂
,F1×OB小于
小于
F2×OA.(填“大于”、“小于”) 在研究杠杆平衡条件的探究活动中:
在研究杠杆平衡条件的探究活动中: