摘要: 物理学分为力学. . . .原子物理学等许多分支学科.
网址:http://m.1010jiajiao.com/timu3_id_1415901[举报]
物理兴趣小组的同学,利用如图所示的装置,在杠杆支点的两边分别挂上钩码来探究杠杆的平衡条件.
(1)如图 1所示,为使杠杆在水平位置平衡,应将右端的平衡螺母向
(2)实验中测得的数据如表所示,
(表格中漏填的数据为
(3)有的同学按现有方案得出如下结论:“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离”.这个结论与杠杆平衡条件不符,原因是实验过程中
A.没有改变力的大小 B.没有改变力的方向
C.没有改变力的作用点 D.实验次数较少,结论具有偶然性
(4)杠杆平衡后,小明在图3所示的A位置挂上两个钩码,可在B位置挂上
(5)他改用弹簧测力计在图4所示的C位置斜向下拉,若每个钩码重1N.当杠杆在水平位置平衡时,测力计的示数将
(6)用绳子拴住一根粗细不同的大树某处,静止后大树水平平衡,如图5所示.现将大树从拴绳处沿竖直方向切成A、B两段,根据图5可判断GA

查看习题详情和答案>>
(1)如图 1所示,为使杠杆在水平位置平衡,应将右端的平衡螺母向
右
右
(选填“左”或“右”)移动,将杠杆调在水平位置平衡的目的是为了方便测量力臂
力臂
.(2)实验中测得的数据如表所示,
| 测量 序号 |
动力 F1/N |
动力臂 l1/cm |
阻力 F2/N |
阻力臂 l2/cm |
| ① | 1 | 20 | 2 | 10 |
| ② | 2 | 15 | 1.5 | 20 |
| ③ | 3 | 5 | 15 |
1
1
N.(3)有的同学按现有方案得出如下结论:“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离”.这个结论与杠杆平衡条件不符,原因是实验过程中
B
B
(填字母).A.没有改变力的大小 B.没有改变力的方向
C.没有改变力的作用点 D.实验次数较少,结论具有偶然性
(4)杠杆平衡后,小明在图3所示的A位置挂上两个钩码,可在B位置挂上
4
4
个钩码,使杠杆在水平位置平衡.(5)他改用弹簧测力计在图4所示的C位置斜向下拉,若每个钩码重1N.当杠杆在水平位置平衡时,测力计的示数将
大于
大于
(选填“大于”、“等于”或“小于”)1N.(6)用绳子拴住一根粗细不同的大树某处,静止后大树水平平衡,如图5所示.现将大树从拴绳处沿竖直方向切成A、B两段,根据图5可判断GA
>
>
GB(选填“>”、“=”或“<”).物理学中一个基本的观念是“世界是由物质组成的”.从微观世界到无垠的宇宙,存在着各种各样的物质,科学家们正在探索着物质的奥秘.
(1)1811年,意大利物理学家阿伏加德罗将组成物质的仍能保持其化学性质不变的最小微粒命名为
(2)物体很难被拉开,说明分子之间存在
(3)在微观世界,有很多物理现象不易直接观察,要研究它们的运动等规律,就必须使之转化为我们熟知的、看得见摸得着的宏观现象来认识它们,这种方法叫转换法.
例如:分子的热运动我们肉眼无法观察,但是我们可以转换成观察一滴墨水在水杯中的扩散现象来认识分子的运动.
请结合我们初二学习的物理知识,再举一例,简要说明转换法的运用.
查看习题详情和答案>>
(1)1811年,意大利物理学家阿伏加德罗将组成物质的仍能保持其化学性质不变的最小微粒命名为
分子
分子
.1909年,著名科学家卢瑟福在进行了α粒子散射
α粒子散射
实验后,提出了原子核式结构模型.(2)物体很难被拉开,说明分子之间存在
引力
引力
;物体很难被压缩,说明分子间存在斥力
斥力
.(3)在微观世界,有很多物理现象不易直接观察,要研究它们的运动等规律,就必须使之转化为我们熟知的、看得见摸得着的宏观现象来认识它们,这种方法叫转换法.
例如:分子的热运动我们肉眼无法观察,但是我们可以转换成观察一滴墨水在水杯中的扩散现象来认识分子的运动.
请结合我们初二学习的物理知识,再举一例,简要说明转换法的运用.
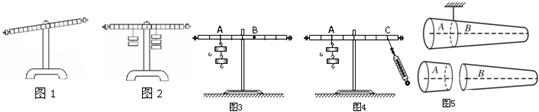
物理兴趣小组的同学,利用如图所示的装置,在杠杆支点的两边分别挂上钩码来探究杠杆的平衡条件.
(1)如图 1所示,为使杠杆在水平位置平衡,应将右端的平衡螺母向________(选填“左”或“右”)移动,将杠杆调在水平位置平衡的目的是为了方便测量________.
(2)实验中测得的数据如表所示,
| 测量 序号 | 动力 F1/N | 动力臂 l1/cm | 阻力 F2/N | 阻力臂 l2/cm |
| ① | 1 | 20 | 2 | 10 |
| ② | 2 | 15 | 1.5 | 20 |
| ③ | 3 | 5 | 15 |
(3)有的同学按现有方案得出如下结论:“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离”.这个结论与杠杆平衡条件不符,原因是实验过程中________(填字母).
A.没有改变力的大小 B.没有改变力的方向
C.没有改变力的作用点 D.实验次数较少,结论具有偶然性
(4)杠杆平衡后,小明在图3所示的A位置挂上两个钩码,可在B位置挂上________个钩码,使杠杆在水平位置平衡.
(5)他改用弹簧测力计在图4所示的C位置斜向下拉,若每个钩码重1N.当杠杆在水平位置平衡时,测力计的示数将________(选填“大于”、“等于”或“小于”)1N.
(6)用绳子拴住一根粗细不同的大树某处,静止后大树水平平衡,如图5所示.现将大树从拴绳处沿竖直方向切成A、B两段,根据图5可判断GA________GB(选填“>”、“=”或“<”).
 查看习题详情和答案>>
查看习题详情和答案>>
物理兴趣小组的同学,利用如图所示的装置,在杠杆支点的两边分别挂上钩码来探究杠杆的平衡条件.
(1)如图 1所示,为使杠杆在水平位置平衡,应将右端的平衡螺母向______(选填“左”或“右”)移动,将杠杆调在水平位置平衡的目的是为了方便测量______.
(2)实验中测得的数据如表所示,
(表格中漏填的数据为______N.
(3)有的同学按现有方案得出如下结论:“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离”.这个结论与杠杆平衡条件不符,原因是实验过程中______(填字母).
A.没有改变力的大小 B.没有改变力的方向
C.没有改变力的作用点 D.实验次数较少,结论具有偶然性
(4)杠杆平衡后,小明在图3所示的A位置挂上两个钩码,可在B位置挂上______个钩码,使杠杆在水平位置平衡.
(5)他改用弹簧测力计在图4所示的C位置斜向下拉,若每个钩码重1N.当杠杆在水平位置平衡时,测力计的示数将______(选填“大于”、“等于”或“小于”)1N.
(6)用绳子拴住一根粗细不同的大树某处,静止后大树水平平衡,如图5所示.现将大树从拴绳处沿竖直方向切成A、B两段,根据图5可判断GA______GB(选填“>”、“=”或“<”).
查看习题详情和答案>>
(1)如图 1所示,为使杠杆在水平位置平衡,应将右端的平衡螺母向______(选填“左”或“右”)移动,将杠杆调在水平位置平衡的目的是为了方便测量______.
(2)实验中测得的数据如表所示,
| 测量 序号 |
动力 F1/N |
动力臂 l1/cm |
阻力 F2/N |
阻力臂 l2/cm |
| ① | 1 | 20 | 2 | 10 |
| ② | 2 | 15 | 1.5 | 20 |
| ③ | 3 | 5 | 15 |
(3)有的同学按现有方案得出如下结论:“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离”.这个结论与杠杆平衡条件不符,原因是实验过程中______(填字母).
A.没有改变力的大小 B.没有改变力的方向
C.没有改变力的作用点 D.实验次数较少,结论具有偶然性
(4)杠杆平衡后,小明在图3所示的A位置挂上两个钩码,可在B位置挂上______个钩码,使杠杆在水平位置平衡.
(5)他改用弹簧测力计在图4所示的C位置斜向下拉,若每个钩码重1N.当杠杆在水平位置平衡时,测力计的示数将______(选填“大于”、“等于”或“小于”)1N.
(6)用绳子拴住一根粗细不同的大树某处,静止后大树水平平衡,如图5所示.现将大树从拴绳处沿竖直方向切成A、B两段,根据图5可判断GA______GB(选填“>”、“=”或“<”).
物理兴趣小组的同学,利用如图所示的装置,在杠杆支点的两边分别挂上钩码来探究杠杆的平衡条件.
(1)如图 1所示,为使杠杆在水平位置平衡,应将右端的平衡螺母向______(选填“左”或“右”)移动,将杠杆调在水平位置平衡的目的是为了方便测量______.
(2)实验中测得的数据如表所示,
(表格中漏填的数据为______N.
(3)有的同学按现有方案得出如下结论:“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离”.这个结论与杠杆平衡条件不符,原因是实验过程中______(填字母).
A.没有改变力的大小 B.没有改变力的方向
C.没有改变力的作用点 D.实验次数较少,结论具有偶然性
(4)杠杆平衡后,小明在图3所示的A位置挂上两个钩码,可在B位置挂上______个钩码,使杠杆在水平位置平衡.
(5)他改用弹簧测力计在图4所示的C位置斜向下拉,若每个钩码重1N.当杠杆在水平位置平衡时,测力计的示数将______(选填“大于”、“等于”或“小于”)1N.
(6)用绳子拴住一根粗细不同的大树某处,静止后大树水平平衡,如图5所示.现将大树从拴绳处沿竖直方向切成A、B两段,根据图5可判断GA______GB(选填“>”、“=”或“<”).

查看习题详情和答案>>
(1)如图 1所示,为使杠杆在水平位置平衡,应将右端的平衡螺母向______(选填“左”或“右”)移动,将杠杆调在水平位置平衡的目的是为了方便测量______.
(2)实验中测得的数据如表所示,
| 测量 序号 | 动力 F1/N | 动力臂 l1/cm | 阻力 F2/N | 阻力臂 l2/cm |
| ① | 1 | 20 | 2 | 10 |
| ② | 2 | 15 | 1.5 | 20 |
| ③ | 3 | 5 | 15 |
(3)有的同学按现有方案得出如下结论:“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离”.这个结论与杠杆平衡条件不符,原因是实验过程中______(填字母).
A.没有改变力的大小 B.没有改变力的方向
C.没有改变力的作用点 D.实验次数较少,结论具有偶然性
(4)杠杆平衡后,小明在图3所示的A位置挂上两个钩码,可在B位置挂上______个钩码,使杠杆在水平位置平衡.
(5)他改用弹簧测力计在图4所示的C位置斜向下拉,若每个钩码重1N.当杠杆在水平位置平衡时,测力计的示数将______(选填“大于”、“等于”或“小于”)1N.
(6)用绳子拴住一根粗细不同的大树某处,静止后大树水平平衡,如图5所示.现将大树从拴绳处沿竖直方向切成A、B两段,根据图5可判断GA______GB(选填“>”、“=”或“<”).
查看习题详情和答案>>