摘要:在研究杠杆平衡的实验中.请把表格中的数据补充完整. 实验次数 F1(N) L1(cm) F2 (N) L2 (cm) 1 0.5 1 0.2 2 1.5 0.4 0.1
网址:http://m.1010jiajiao.com/timu3_id_1409834[举报]
在研究杠杆平衡的实验中,首先调节平衡螺母,使杠杆在水平位置平衡。
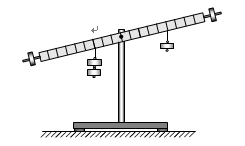
(1)小刚把钩码(每个钩码的质量相同)挂在如图所示的位置时,将右侧的钩码向右移动________格(每格长度相同),可使杠杆在水平位置平衡。此时在两侧钩码下方各加挂一个钩码,杠杆将 (选填“左侧下降”或“右侧下降”)。
(2)小华保持动力臂为12cm,阻力臂为6cm不变,然后改变动力F1和阻力F2,并保持杠杆水平位置平衡,分别测量出动力F1和阻力F2的数据如下表所示。请根据实验条件和实验数据归纳出阻力F2与动力F1的关系: 。
查看习题详情和答案>>
(1)小刚把钩码(每个钩码的质量相同)挂在如图所示的位置时,将右侧的钩码向右移动________格(每格长度相同),可使杠杆在水平位置平衡。此时在两侧钩码下方各加挂一个钩码,杠杆将 (选填“左侧下降”或“右侧下降”)。
(2)小华保持动力臂为12cm,阻力臂为6cm不变,然后改变动力F1和阻力F2,并保持杠杆水平位置平衡,分别测量出动力F1和阻力F2的数据如下表所示。请根据实验条件和实验数据归纳出阻力F2与动力F1的关系: 。
| F1/N | 0.5 | 1.0 | 1.5 | 2.0 | 2.5 | 3 |
| F2/N | 1.0 | 2.0 | 3.0 | 4.0 | 5.0 | 6.0 |
在研究杠杆平衡的实验中,首先调节平衡螺母,使杠杆在水平位置平衡。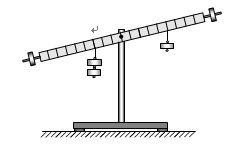
(1)小刚把钩码(每个钩码的质量相同)挂在如图所示的位置时,将右侧的钩码向右移动________格(每格长度相同),可使杠杆在水平位置平衡。此时在两侧钩码下方各加挂一个钩码,杠杆将 (选填“左侧下降”或“右侧下降”)。
(2)小华保持动力臂为12cm,阻力臂为6cm不变,然后改变动力F1和阻力F2,并保持杠杆水平位置平衡,分别测量出动力F1和阻力F2的数据如下表所示。请根据实验条件和实验数据归纳出阻力F2与动力F1的关系: 。
| F1/N | 0.5 | 1.0 | 1.5 | 2.0 | 2.5 | 3 |
| F2/N | 1.0 | 2.0 | 3.0 | 4.0 | 5.0 | 6.0 |
在研究杠杆平衡的实验中,首先调节平衡螺母,使杠杆在水平位置平衡。

(1)小刚把钩码(每个钩码的质量相同)挂在如图所示的位置时,将右侧的钩码向右移动________格(每格长度相同),可使杠杆在水平位置平衡。此时在两侧钩码下方各加挂一个钩码,杠杆将 (选填“左侧下降”或“右侧下降”)。
(2)小华保持动力臂为12cm,阻力臂为6cm不变,然后改变动力F1和阻力F2,并保持杠杆水平位置平衡,分别测量出动力F1和阻力F2的数据如下表所示。请根据实验条件和实验数据归纳出阻力F2与动力F1的关系: 。
(1)小刚把钩码(每个钩码的质量相同)挂在如图所示的位置时,将右侧的钩码向右移动________格(每格长度相同),可使杠杆在水平位置平衡。此时在两侧钩码下方各加挂一个钩码,杠杆将 (选填“左侧下降”或“右侧下降”)。
(2)小华保持动力臂为12cm,阻力臂为6cm不变,然后改变动力F1和阻力F2,并保持杠杆水平位置平衡,分别测量出动力F1和阻力F2的数据如下表所示。请根据实验条件和实验数据归纳出阻力F2与动力F1的关系: 。
| F1/N | 0.5 | 1.0 | 1.5 | 2.0 | 2.5 | 3 |
| F2/N | 1.0 | 2.0 | 3.0 | 4.0 | 5.0 | 6.0 |
 小芳同学在研究杠杆平衡的实验中,首先调节平衡螺母,使杠杆在水平位置平衡,目的是
小芳同学在研究杠杆平衡的实验中,首先调节平衡螺母,使杠杆在水平位置平衡,目的是便于测量力臂,同时消除杠杆自身重对杠杆平衡的影响
便于测量力臂,同时消除杠杆自身重对杠杆平衡的影响
.
| F1/N | 0.5 | 1.0 | 1.5 | 2.0 | 2.5 | 3 |
| F2/N | 1.0 | 2.0 | 3.0 | 4.0 | 5.0 | 6.0 |
1
1
格(每格长度相同),可使杠杆在水平位置平衡.(2)小华保持动力臂、阻力臂为不变,然后改变动力F1和阻力F2,并保持杠杆水平位置平衡,分别测量出动力F1和阻力F2的数据如表所示.请根据实验条件和实验数据归纳出阻力F2与动力F1的关系式:
F2=2F1
F2=2F1
.
| |||||
