摘要: 研究杠杆的平衡条件: ① 杠杆平衡是指:杠杆静止或匀速转动. ② 实验前:应调节杠杆两端的螺母.使杠杆在水平位置平衡.这样做的目的是:可以方便的从杠杆上量出力臂. ③ 结论:杠杆的平衡条件是: 动力×动力臂=阻力×阻力臂.写成公式F1l1=F2l2 也可写成:F1 / F2=l2 / l1 解题指导:分析解决有关杠杆平衡条件问题.必须要画出杠杆示意图,弄清受力与方向和力臂大小,然后根据具体的情况具体分析.确定如何使用平衡条件解决有关问题.(如:杠杆转动时施加的动力如何变化.沿什么方向施力最小等.) 解决杠杆平衡时动力最小问题:此类问题中阻力×阻力臂为一定值.要使动力最小.必须使动力臂最大.要使动力臂最大需要做到①在杠杆上找一点.使这点到支点的距离最远,②动力方向应该是过该点且和该连线垂直的方向.
网址:http://m.1010jiajiao.com/timu3_id_1321531[举报]
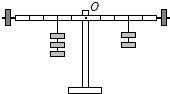 “研究杠杆的平衡条件”的实验如图所示,回答下列问题:
“研究杠杆的平衡条件”的实验如图所示,回答下列问题:(1)杠杆两端的调节螺母,是起调节杠杆
(2)实验前先要调节杠杆两端的螺母,使其在水平位置平衡,这是为使杠杆所受的
(3)调节好以后,仍要使杠杆在水平位置平衡,是为了
(4)通过实验,得出的结论是:
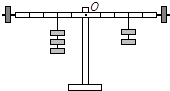
 “研究杠杆的平衡条件”的实验如图所示,回答下列问题:
“研究杠杆的平衡条件”的实验如图所示,回答下列问题:(1)实验前先要调节杠杆两端的螺母,使其在水平位置平衡,这是为使杠杆所受的
重力
重力
通过支点,从而可以不考虑杠杆的重力对其转动的影响.如果某同学做实验时发现杠杆左高右低,应将杠杆左端的螺母向左
左
调;或将右端的螺母向左
左
调.(2)调节好以后,仍要使杠杆在水平位置平衡,是为了
便于测量力臂的大小
便于测量力臂的大小
.如杠杆不在水平位置平衡时,应通过调节钩码的数量
数量
或位置
位置
来实现,而不能再调节平衡螺母
平衡螺母
.(3)通过实验,得出的结论是:
动力×动力臂=阻力×阻力臂
动力×动力臂=阻力×阻力臂
. “研究杠杆的平衡条件”的实验如图所示,回答下列问题:
“研究杠杆的平衡条件”的实验如图所示,回答下列问题:(1)实验前先要调节杠杆两端的螺母,使其
水平平衡
水平平衡
,这是为使杠杆所受的重力
重力
通过支点,从而可以不考虑杠杆的重力对其转动的影响.如果某同学做实验时发现杠杆左高右低,应将杠杆左端的螺母向左
左
调;或将右端的螺母向左
左
调.(2)调节好以后,仍要使杠杆在水平位置平衡,是为了
便于在杠杆上测量力臂
便于在杠杆上测量力臂
.(3)在实验中有一组同学猜想杠杆的平衡条件可能是“动力+动力臂=阻力+阻力臂”,他们经过实验,获得了下列数据:
| 动力F1/N | 动力臂L1/cm | 阻力F2/N | 阻力臂L2/cm |
| 4 | 5 | 5 | 4 |
一次实验不能得出普遍结论
一次实验不能得出普遍结论
.研究杠杆的平衡条件的实验:
(1)实验中,如杠杆左高右低,则应向 调节杠杆两端的 平衡螺母,使杠杆在 位置平衡,这样能方便地测量 的大小.
(2)实验中,在杠杆两边挂上不同数量的钩码调节钩码的位置,是刚刚重新平衡,测的数据填入下表,并补充空格的数据:
查看习题详情和答案>>
(1)实验中,如杠杆左高右低,则应向
(2)实验中,在杠杆两边挂上不同数量的钩码调节钩码的位置,是刚刚重新平衡,测的数据填入下表,并补充空格的数据:
| 实验次数 | 动力F1/N | 动力臂L1/m | 阻力F2/N | 阻力臂L2/m |
| 1 | 1.0 | 0.15 | 3.0 | 0.05 |
| 2 | 2.5 | 5.0 | 0.10 | |
| 3 | 4.0 | 0.2 | 2.0 |
研究杠杆的平衡条件的实验:
(1)实验中,如杠杆左高右低,则应向________调节杠杆两端的 平衡螺母,使杠杆在________位置平衡,这样能方便地测量________的大小.
(2)实验中,在杠杆两边挂上不同数量的钩码调节钩码的位置,是刚刚重新平衡,测的数据填入下表,并补充空格的数据:
| 实验次数 | 动力F1/N | 动力臂L1/m | 阻力F2/N | 阻力臂L2/m |
| 1 | 1.0 | 0.15 | 3.0 | 0.05 |
| 2 | 2.5 | ________ | 5.0 | 0.10 |
| 3 | 4.0 | 0.2 | 2.0 | ________ |