题目内容
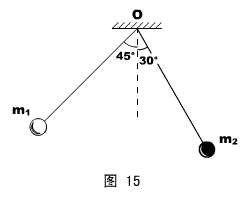
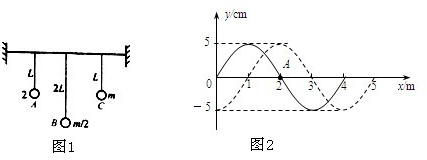
(1)如图1所示为受迫振动的演示装置,当单摆A振动起来后,通过水平悬绳迫使单摆B、C振动,则下列说法正确的是 :
A.只有A、C摆振动周期相等
B.A摆的振幅比B摆小
C.C摆的振幅比B摆大
D. A、B、C三摆的振动周期相等
(2)在“用单摆测重力加速度”的实验中,若测得的重力加速度g值偏大,其原因可能是 :
A.摆球质量太大
B.误将摆线长当成摆长,未加小球的半径
C.误将n次全振动记录为(n+1)次
D.单摆振幅偏小
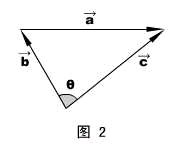
(3)如图2所示,实线是一列简谐横波在t1=0时刻的波形图,虚线为t2=0.5s时的波形图,已知0<t2-t1<T,t1=0时,x=2m处的质点A正向y轴正方向振动.则:
①质点A的振动周期为 ;
②波的传播方向是 ;
③波速大小为 ;
④从t2时刻计时,x=1m处的质点的振动方程是 .
A.只有A、C摆振动周期相等
B.A摆的振幅比B摆小
C.C摆的振幅比B摆大
D. A、B、C三摆的振动周期相等
(2)在“用单摆测重力加速度”的实验中,若测得的重力加速度g值偏大,其原因可能是
A.摆球质量太大
B.误将摆线长当成摆长,未加小球的半径
C.误将n次全振动记录为(n+1)次
D.单摆振幅偏小
(3)如图2所示,实线是一列简谐横波在t1=0时刻的波形图,虚线为t2=0.5s时的波形图,已知0<t2-t1<T,t1=0时,x=2m处的质点A正向y轴正方向振动.则:
①质点A的振动周期为
②波的传播方向是
③波速大小为
④从t2时刻计时,x=1m处的质点的振动方程是
分析:(1)由题意A做自由振动,B、C做受迫振动,受迫振动的周期等于驱动力的周期,即等于A的固有周期.C发生共振,振幅最大.
(2)根据单摆的周期公式得出g的表达式,再分析误差产生的原因.
(3)t1=0时,x=2m处的质点A正向y轴正方向振动,知波的传播方向.由根据波形的平移和0<t2-t1<T,确定出周期,求出波速的大小.根据t2时刻,x=1m处的质点的位移和速度大小,再写出其振动方程.
(2)根据单摆的周期公式得出g的表达式,再分析误差产生的原因.
(3)t1=0时,x=2m处的质点A正向y轴正方向振动,知波的传播方向.由根据波形的平移和0<t2-t1<T,确定出周期,求出波速的大小.根据t2时刻,x=1m处的质点的位移和速度大小,再写出其振动方程.
解答:解:(1)由题意,A做自由振动,其振动周期就等于其固有周期,而B、C在A产生的驱动力作用下做受迫振动,受迫振动的周期等于驱动力的周期,即等于A的固有周期,所以三个单摆的振动周期相等.由于C、A的摆长相等,则C的固有周期与驱动力周期相等,产生共振,其振幅振幅比B摆大.所以CD正确,AB错误.
故选CD
(2)由单摆周期公式T=2π
得,g=
.
A、由上式可知,g与摆球质量无关.故A错误.
B、若误将摆线长当成摆长,未加小球的半径,摆长l偏小,则g值偏小.故B错误.
C、单摆的周期T=
.若误将n次全振动记录为(n+1)次,T偏小,则g偏大.故C正确.
D、g与振幅无关.故D错误.
故选C
(3)①②t1=0时,x=2m处的质点A正向y轴正方向振动,则可知波的传播方向是沿x轴正方向.已知0<t2-t1<T,根据波形的平移得知,t2-t1=
,解得T=2s.③波速大小为v=
m/s=2m/s.④t2时刻,x=1m处的质点的位移为0,速度方向向下,振幅为A=5cm,则其振动方程为y=-Asin
t=-5sinπt(cm).
故答案为:
(1)CD;(2)C;(3)①2s;②沿x轴正方向;③2m/s;④-5sinπt(cm).
故选CD
(2)由单摆周期公式T=2π
|
| 4π2l |
| T2 |
A、由上式可知,g与摆球质量无关.故A错误.
B、若误将摆线长当成摆长,未加小球的半径,摆长l偏小,则g值偏小.故B错误.
C、单摆的周期T=
| t |
| n |
D、g与振幅无关.故D错误.
故选C
(3)①②t1=0时,x=2m处的质点A正向y轴正方向振动,则可知波的传播方向是沿x轴正方向.已知0<t2-t1<T,根据波形的平移得知,t2-t1=
| T |
| 4 |
| λ |
| T |
| 4 |
| 2 |
| 2π |
| T |
故答案为:
(1)CD;(2)C;(3)①2s;②沿x轴正方向;③2m/s;④-5sinπt(cm).
点评:本题考查受迫振动的周期、共振现象、单摆的周期公式应用和波动图象的理解,难度选中.

练习册系列答案
 时刻准备着暑假作业原子能出版社系列答案
时刻准备着暑假作业原子能出版社系列答案 暑假衔接教材期末暑假预习武汉出版社系列答案
暑假衔接教材期末暑假预习武汉出版社系列答案 假期作业暑假成长乐园新疆青少年出版社系列答案
假期作业暑假成长乐园新疆青少年出版社系列答案
相关题目



 =
=