题目内容
19.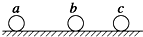 如图所示,光滑绝缘水平面上有三个带电小球a、b、c(可视为点电荷),三球沿一条直线摆放,仅在它们之间的静电力作用下处于静止状态,其中a带正电,b带负电,ab两球间的距离大于bc两球间的距离,则以下判断正确的是( )
如图所示,光滑绝缘水平面上有三个带电小球a、b、c(可视为点电荷),三球沿一条直线摆放,仅在它们之间的静电力作用下处于静止状态,其中a带正电,b带负电,ab两球间的距离大于bc两球间的距离,则以下判断正确的是( )| A. | c一定带负电 | B. | a对c的静电力是斥力 | ||
| C. | a的电荷量电荷量最大 | D. | 若把a撤去瞬间,b的加速度向左 |
分析 因题目中要求三个小球均处于平衡状态,故可分别对任意两球进行分析列出平衡方程即可求得结果.
解答 解:AB、根据电场力方向来确定各自电性,从而得出“两同夹一异”,因此A错误,B正确.
C、同时根据库仑定律来确定电场力的大小,并由平衡条件来确定各自电量的大小,因此在大小上一定为“两大夹一小”,且ab两球间的距离大于bc两球间的距离,故C正确;
D、根据牛顿第二定律,当把a撤去瞬间,b的加速度向左,故D正确,
故选:BCD.
点评 三个小球只受静电力而平衡时,三个小球所带的电性一定为“两同夹一异”,且在大小上一定为“两大夹一小”.

练习册系列答案
 全能练考卷系列答案
全能练考卷系列答案 一课一练课时达标系列答案
一课一练课时达标系列答案
相关题目
9.关于摩擦力,下列说法正确的是( )
| A. | 运动着的物体不可能受静摩擦力作用,只能受滑动摩擦力作用 | |
| B. | 物体受到摩擦力作用时,一定受到弹力作用 | |
| C. | 握在手中的瓶子握得越紧越不容易滑落下来是因为握得越紧静摩擦力越大 | |
| D. | 滑动摩擦力的方向总是和产生这个滑动摩擦力的接触面间的弹力的方向垂直 |
7.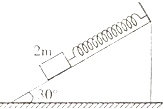 用轻弹簧竖直悬挂质量为m的物体,静止时弹簧的伸长量为L0,现用该弹簧沿斜面方向拉住质量为2m的物体,系统静止时弹簧的伸长量也为L0,斜面倾角为30°,如图所示,则物体所受摩擦力( )
用轻弹簧竖直悬挂质量为m的物体,静止时弹簧的伸长量为L0,现用该弹簧沿斜面方向拉住质量为2m的物体,系统静止时弹簧的伸长量也为L0,斜面倾角为30°,如图所示,则物体所受摩擦力( )
用轻弹簧竖直悬挂质量为m的物体,静止时弹簧的伸长量为L0,现用该弹簧沿斜面方向拉住质量为2m的物体,系统静止时弹簧的伸长量也为L0,斜面倾角为30°,如图所示,则物体所受摩擦力( )| A. | 等于零 | B. | 大小为$\frac{mg}{2}$,方向沿斜面向下 | ||
| C. | 大小为$\frac{mg}{2}$,方向沿斜面向上 | D. | 大小为mg,方向沿斜面向上 |
14.带电粒子(不计重力)可能所处的状态是( )
| A. | 在磁场中做匀加速直线运动 | B. | 在电场中做匀速圆周运动 | ||
| C. | 在匀强磁场中做抛体运动 | D. | 在匀强电场中做匀速直线运动 |
4. 2011年7月在土耳其伊斯坦布尔举行的第15届机器人世界杯赛上,中同科大“蓝鹰”队获得仿真2D组冠军和服务机器人组亚军,改写了我国服务机器人从未进人世界前5的纪录,标志着我国在该领域的研究取得了重要进展.图中是科大著名服务机器人“可佳”,如图所示,现要执行一项任务,给它设定了如下动作程序:机器人在平面内,由点(0,0)出发,沿直线运动到点(3,1),然后又由点(3,1 )沿直线运动到点(1,4),然后又由点(1,4)沿直线运动到点(5,5),然后又由点(5,5)沿直线运动到点(2,2).整个过程中机器人所用时间为2s.则( )
2011年7月在土耳其伊斯坦布尔举行的第15届机器人世界杯赛上,中同科大“蓝鹰”队获得仿真2D组冠军和服务机器人组亚军,改写了我国服务机器人从未进人世界前5的纪录,标志着我国在该领域的研究取得了重要进展.图中是科大著名服务机器人“可佳”,如图所示,现要执行一项任务,给它设定了如下动作程序:机器人在平面内,由点(0,0)出发,沿直线运动到点(3,1),然后又由点(3,1 )沿直线运动到点(1,4),然后又由点(1,4)沿直线运动到点(5,5),然后又由点(5,5)沿直线运动到点(2,2).整个过程中机器人所用时间为2s.则( )
2011年7月在土耳其伊斯坦布尔举行的第15届机器人世界杯赛上,中同科大“蓝鹰”队获得仿真2D组冠军和服务机器人组亚军,改写了我国服务机器人从未进人世界前5的纪录,标志着我国在该领域的研究取得了重要进展.图中是科大著名服务机器人“可佳”,如图所示,现要执行一项任务,给它设定了如下动作程序:机器人在平面内,由点(0,0)出发,沿直线运动到点(3,1),然后又由点(3,1 )沿直线运动到点(1,4),然后又由点(1,4)沿直线运动到点(5,5),然后又由点(5,5)沿直线运动到点(2,2).整个过程中机器人所用时间为2s.则( )| A. | 机器人的运动轨迹是一条直线 | |
| B. | 整个过程中机器人的路程为2$\sqrt{2}$m | |
| C. | 整个过程中机器人的平均速度大小为1m/s | |
| D. | 整个过程中机器人的位移大小为2$\sqrt{2}$m |
 如图所示,在竖直放置的圆柱形导热容器内用一轻质活塞密封一定质量的理想气体,活塞与容器壁间无摩擦,容器的横截面积为S.开始时活塞与容器底的距离为h0,设大气压恒为p0.若外界温度保持不变,现用外力将活塞缓慢提升d后,活塞再次平衡.求活塞再次平衡时容器内气体的压强的大小.
如图所示,在竖直放置的圆柱形导热容器内用一轻质活塞密封一定质量的理想气体,活塞与容器壁间无摩擦,容器的横截面积为S.开始时活塞与容器底的距离为h0,设大气压恒为p0.若外界温度保持不变,现用外力将活塞缓慢提升d后,活塞再次平衡.求活塞再次平衡时容器内气体的压强的大小. 已知一辆汽车在平直公路上运动,它的位移(s)-时间(t)图象如图所示.
已知一辆汽车在平直公路上运动,它的位移(s)-时间(t)图象如图所示.
9.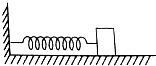 如图所示,物块质量为m,它与水平桌面间的动摩擦因数为μ.起初用手按住物块,弹簧的伸长量为x,然后放手,物块向左运动至弹簧压缩量为y时停下.当弹簧的长度回到原长时,物块的速度为v,则( )
如图所示,物块质量为m,它与水平桌面间的动摩擦因数为μ.起初用手按住物块,弹簧的伸长量为x,然后放手,物块向左运动至弹簧压缩量为y时停下.当弹簧的长度回到原长时,物块的速度为v,则( )
如图所示,物块质量为m,它与水平桌面间的动摩擦因数为μ.起初用手按住物块,弹簧的伸长量为x,然后放手,物块向左运动至弹簧压缩量为y时停下.当弹簧的长度回到原长时,物块的速度为v,则( )| A. | x>y | |
| B. | 物块运动过程中的最大速度为v | |
| C. | 全过程弹簧弹性势能减小量为μmg(x+y) | |
| D. | 从物块开始运动到弹簧恢复原长的过程中弹力做功$\frac{1}{2}$mv2-μmgx |