题目内容
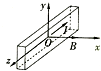 霍尔式位移传感器的测量原理如图所示,磁场方向沿x轴正方向,磁感应强度B随x的变化关系为B=B0+kx(B0、k均为大于零的常数).薄形霍尔元件的工作面垂直于光轴,通过的电流I方向沿z轴负方向,霍尔元件沿x轴正方向以速度v匀速运动. 要使元件上、下表面产生的电势差变化得快,可以采取的方法是( )
霍尔式位移传感器的测量原理如图所示,磁场方向沿x轴正方向,磁感应强度B随x的变化关系为B=B0+kx(B0、k均为大于零的常数).薄形霍尔元件的工作面垂直于光轴,通过的电流I方向沿z轴负方向,霍尔元件沿x轴正方向以速度v匀速运动. 要使元件上、下表面产生的电势差变化得快,可以采取的方法是( )| A、增大 I | B、增大B0 | C、减小k | D、减小v |
分析:霍尔元件中移动的是自由电子,自由电子受到洛伦兹力发生偏转,从而可知道上下表面电势的高低.上下两表面分别带上正负电荷,从而形成电势差,最终电子在电场力和洛伦兹力的作用下处于平衡.
解答:解:最终电子在电场力和洛伦兹力的作用下处于平衡,设霍尔元件的上下表面的间距为d,有:
q
=qvB
电流的微观表达式为:
I=nqvS
联立解得:
U=
①
A、由①式,U∝I;增加电流时,元件上、下表面产生的电势差变化得快;故A正确;
B、C、D、由①式,U∝B;霍尔元件沿x轴正方向以速度v匀速运动,要使元件上、下表面产生的电势差变化得快,则需要磁感应强度变化加快;由于B=B0+kx,根据可以通过增加k或v来使元件上、下表面产生的电势差变化得快;故B错误,C错误,D错误;
故选:A.
q
| U |
| d |
电流的微观表达式为:
I=nqvS
联立解得:
U=
| BdI |
| nqS |
A、由①式,U∝I;增加电流时,元件上、下表面产生的电势差变化得快;故A正确;
B、C、D、由①式,U∝B;霍尔元件沿x轴正方向以速度v匀速运动,要使元件上、下表面产生的电势差变化得快,则需要磁感应强度变化加快;由于B=B0+kx,根据可以通过增加k或v来使元件上、下表面产生的电势差变化得快;故B错误,C错误,D错误;
故选:A.
点评:解决本题的关键知道霍尔元件中移动的是自由电子,最终电子在电场力和洛伦兹力的作用下处于平衡,上下表面形成稳定的电势差.

练习册系列答案
相关题目
 (2011?南通二模)霍尔式位移传感器的测量原理是:如图所示,有一个沿z轴方向的磁场,磁感应强度B=B0+kz(B0,k均为常数),将传感器固定在物体上,保持通过霍尔元件的电流I不变(方向如图中箭头所示).当物体沿z轴方向移动时,由于位置不同,霍尔元件在y轴方向上的上、下表面的电势差U也不同.则( )
(2011?南通二模)霍尔式位移传感器的测量原理是:如图所示,有一个沿z轴方向的磁场,磁感应强度B=B0+kz(B0,k均为常数),将传感器固定在物体上,保持通过霍尔元件的电流I不变(方向如图中箭头所示).当物体沿z轴方向移动时,由于位置不同,霍尔元件在y轴方向上的上、下表面的电势差U也不同.则( )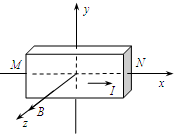 霍尔式位移传感器的测量原理如图9所示,有一个沿z轴方向的磁场,磁感应强度B=B0+kz(B0、k均为常数).将传感器固定在物体上,保持通过霍尔元件的电流I不变(方向如图9所示),当物体沿z轴方向移动时,由于位置不同,霍尔元件在y轴方向的上、下表面的电势差U也不同.则( )
霍尔式位移传感器的测量原理如图9所示,有一个沿z轴方向的磁场,磁感应强度B=B0+kz(B0、k均为常数).将传感器固定在物体上,保持通过霍尔元件的电流I不变(方向如图9所示),当物体沿z轴方向移动时,由于位置不同,霍尔元件在y轴方向的上、下表面的电势差U也不同.则( )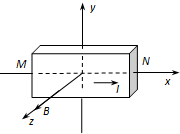 霍尔式位移传感器的测量原理如图所示,有一个沿z轴方向的磁场,磁感应强度B=B0+kz(B0、k均为常数).将传感器固定在物体上,保持通过霍尔元件的电流I不变(方向如图所示),当物体沿z轴方向移动时,由于位置不同,霍尔元件在y轴方向的上、下表面的电势差U也不同.则( )
霍尔式位移传感器的测量原理如图所示,有一个沿z轴方向的磁场,磁感应强度B=B0+kz(B0、k均为常数).将传感器固定在物体上,保持通过霍尔元件的电流I不变(方向如图所示),当物体沿z轴方向移动时,由于位置不同,霍尔元件在y轴方向的上、下表面的电势差U也不同.则( )A、传感器灵敏度
| ||
| B、当物体沿z轴方向移动时,上、下表面的电势差U变小 | ||
C、传感器灵敏度
| ||
| D、若图中霍尔元件是电子导电,则下板电势高 |
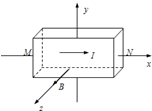 霍尔式位移传感器的测量原理是:如图所示,有一个沿z轴方向的磁场,磁感应强度B=B0+kx(B0、k均为常数),将传感器固定在物体上,保持通过霍尔元件的电流I不变(方向如图中箭头所示).当物体沿z轴方向移动时,由于位置不同,霍尔元件在y轴方向上的上、下表面的电势差U也不同.则下列说法中正确的是( )
霍尔式位移传感器的测量原理是:如图所示,有一个沿z轴方向的磁场,磁感应强度B=B0+kx(B0、k均为常数),将传感器固定在物体上,保持通过霍尔元件的电流I不变(方向如图中箭头所示).当物体沿z轴方向移动时,由于位置不同,霍尔元件在y轴方向上的上、下表面的电势差U也不同.则下列说法中正确的是( )| A、磁感应强度B越大,上、下表面的电势差U越大 | B、霍尔元件运动的速度越大,上、下表面的电势差越大 | C、若图中霍尔元件是电子导电,则下板电势高 | D、电流I取值越大,上、下表面的电势差U越小 |