题目内容
一质量为3 kg的物体,被放置在倾角为α=37°的动摩擦因数为0.2的固定斜面上,在如图3所示的四种情况下不可能处于平衡状态的是(令最大静摩擦力等于滑动摩擦力,sin37°=0.6,cos37°=0.8,g=10 m/s2) ( )
A
解析:物体与斜面间的最大静摩擦力Ffm=μ mgcos37°=4.8 N.物体的重力沿斜面向下的分力为F=mg sin37°=18 N.假设物体在拉力F作用下沿斜面不动,由平衡条件可求得A、B、C、D四种情况下摩擦力必须为FfA=9 N,沿斜面向上;FfB=3 N,沿斜面向上,FfC=0;FfD=4 N,沿斜面向下.因为FfA>Ffm,故A图中物体不可能处于平衡状态.

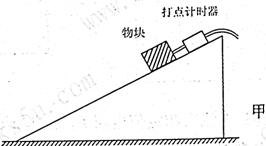
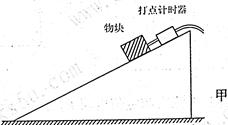
(1)(7分)利用如图甲所示装置探究动能定理,在固定斜面上有一质量为l kg的物块,后面固定一条穿过打点计时器的纸带。先接通电源,待打点稳定后,让物块从静止开始沿斜面匀加速下滑,得到一条如图乙所示的纸带。O点为打出的第二个点,A、B、C、D、E、F、G是计数点,每相邻两计数点间还有4个点未画出,各点间距如图所示,根据相关数据进行下列处理。(打点计时器的打点频率为50Hz,g =" 10" m/s2)

通过传感器测得物体所受的合外力是3.0 N。试完成下表:
| 从O点到各点过程合力所做的功W/J | 各点的动能Ek/J | ||
| OB | 0.8838 | B | 0.8845 |
| OC | 1.3275 | C | 1.3276 |
| OD | ? | D | 1.8634 |
| OE | 2.4858 | E | 2.4865 |
| OF | 3.1998 | F | ? |
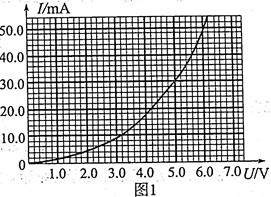
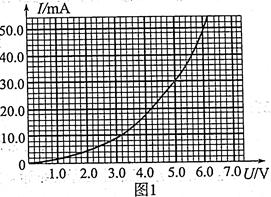
(2)(6分)图1为某一热敏电阻(电阻值随温度的改变而改变,且对温度很敏感)的I – U关系曲线图。通过测量得到图1所示I – U关系的完整曲线,已知电源电动势恒为9 V(内阻不计),滑动变阻器的阻值为0 – 100 Ω,电压表V的内阻约为2 kΩ,电流表A的内阻约为0.2 Ω,热敏电阻的符号为

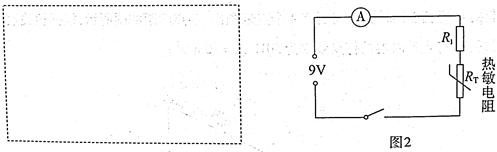
①请在虚线框内画出实验电路原理图。
②由题中给出的电源、热敏电阻、电流表和定值电阻R1组成如图2所示电路,电流表读数为30 mA。由热敏电阻的I – U关系曲线可知,热敏电阻两端的电压为 V;电阻R1的阻值为 Ω
(1)(7分)利用如图甲所示装置探究动能定理,在固定斜面上有一质量为l kg的物块,后面固定一条穿过打点计时器的纸带。先接通电源,待打点稳定后,让物块从静止开始沿斜面匀加速下滑,得到一条如图乙所示的纸带。O点为打出的第二个点,A、B、C、D、E、F、G是计数点,每相邻两计数点间还有4个点未画出,各点间距如图所示,根据相关数据进行下列处理。(打点计时器的打点频率为50Hz,g =" 10" m/s2)

通过传感器测得物体所受的合外力是3.0 N。试完成下表:
|
从O点到各点过程合力所做的功W/J |
各点的动能Ek/J |
||
|
OB |
0.8838 |
B |
0.8845 |
|
OC |
1.3275 |
C |
1.3276 |
|
OD |
? |
D |
1.8634 |
|
OE |
2.4858 |
E |
2.4865 |
|
OF |
3.1998 |
F |
? |
②根据①表中的数据,实验结论是 .
(2)(6分)图1为某一热敏电阻(电阻值随温度的改变而改变,且对温度很敏感)的I – U关系曲线图。通过测量得到图1所示I – U关系的完整曲线,已知电源电动势恒为9
V(内阻不计),滑动变阻器的阻值为0 –
100 Ω,电压表V的内阻约为2 kΩ,电流表A的内阻约为0.2 Ω,热敏电阻的符号为
①请在虚线框内画出实验电路原理图。
②由题中给出的电源、热敏电阻、电流表和定值电阻R1组成如图2所示电路,电流表读数为30 mA。由热敏电阻的I – U关系曲线可知,热敏电阻两端的电压为 V;电阻R1的阻值为 Ω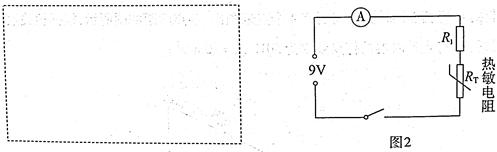
利用如图甲所示装置探究动能定理,在固定斜面上有一质量为l kg的物块,后面固定一条穿过打点计时器的纸带。先接通电源,待打点稳定后,让物块从静止开始沿斜面匀加速下滑,得到一条如图乙所示的纸带。O点为打出的第二个点,A、B、C、D、E、F、G是计数点,每相邻两计数点间还有4个点未画出,各点间距如图所示,根据相关数据进行下列处理。(打点计时器的打点频率为50Hz,g = 10 m/s2)
① 通过传感器测得物体所受的合外力是3.0 N。试完成下表:
| 从O点到各点过程合力所做的功W/J | 各点的动能Ek/J | ||
| OB | 0.8838 | B | 0.8845 |
| OC | 1.3275 | C | 1.3276 |
| OD | ? | D | 1.8634 |
| OE | 2.4858 | E | 2.4865 |
| OF | 3.1998 | F | ? |
②根据①表中的数据,实验结论是 .