题目内容
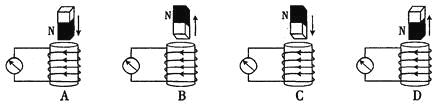
【题目】如图所示为某电子元器件的工作原理示意图,在外界磁场的作用下,当存在AB方向流动的电流时,电子元器件C.D两侧面会形成电势差UCD,下列说法中正确的是( )
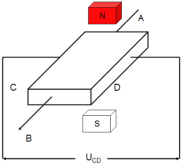
A. 若在AB方向上通以由A向B运动的粒子流,带正电粒子会在C板聚集
B. 当增大AB方向的电流I时, C、D两面的电势差会减小
C. 电子元器件C端电势低于D端电势
D. 电势差UCD的大小仅与电子元器件的制造材料有关
【答案】C
【解析】
若在AB方向上通以由A向B运动的粒子流,根据左手定则可知,带正电粒子会在D板聚集,电子元器件D端电势高于C端电势,选项A错误,C正确;随着粒子的不断积聚,当平衡时满足:![]() ,则
,则![]() ,则当增大AB方向的电流I时,粒子运动的速率v增加,则 C、D两面的电势差会增加,选项B错误;由
,则当增大AB方向的电流I时,粒子运动的速率v增加,则 C、D两面的电势差会增加,选项B错误;由![]() 可知,电势差UCD的大小不只与电子元器件的制造材料有关,选项D错误;故选C.
可知,电势差UCD的大小不只与电子元器件的制造材料有关,选项D错误;故选C.

【题目】 “用DIS研究加速度与力的关系”的实验装置如图(a)所示,实验中用所挂钩码的重量作为细线对小车的拉力F.通过增加钩码的数量,多次测量,可得小车运动的加速度a和所受拉力F的关系图象.他们在轨道水平和倾斜的两种情况下分别做了实验,得到了两条a﹣F图线,如图(b)所示.
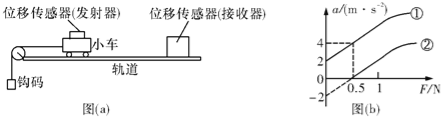
(1)图线 (选填“①”或“②”) 是在轨道右侧抬高成为斜面情况下得到的;
(2)在轨道水平时,小车运动的阻力Ff= N;
(3)(单选)图(b)中,拉力F较大时,a﹣F图线明显弯曲,产生误差.为避免此误差可采取的措施是 .
A.调整轨道的倾角,在未挂钩码时使小车能在轨道上匀速运动 |
B.在增加钩码数量的同时在小车上增加砝码,使钩码的总质量始终远小于小车的总质量 |
C.将无线力传感器捆绑在小车上,再将细线连在力传感器上,用力传感器读数代替钩码的重力 |
D.更换实验中使用的钩码规格,采用质量较小的钩码进行上述实验. |