题目内容
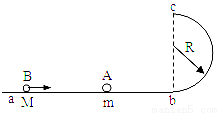
如图所示,abc是光滑的轨道,其中ab是水平的,bc为与ab相切的位于竖直平面内的半圆轨道,其半径R=0.30 m。质量 kg的小球A静止在轨道上,另一质量m2=0.60 kg的小球B以水平速度v0=
kg的小球A静止在轨道上,另一质量m2=0.60 kg的小球B以水平速度v0= m/s与小球A正碰。已知相碰后小球A经过半圆的最高点c落至轨道上距b点为
m/s与小球A正碰。已知相碰后小球A经过半圆的最高点c落至轨道上距b点为 R处,重力加速度g取10m/s2,求:
R处,重力加速度g取10m/s2,求:
(1)碰撞结束时,小球A和B的速度大小;
(2)试论证小球B是否能沿着半圆轨道到达c点。

练习册系列答案
 阅读快车系列答案
阅读快车系列答案
相关题目
题目内容
如图所示,abc是光滑的轨道,其中ab是水平的,bc为与ab相切的位于竖直平面内的半圆轨道,其半径R=0.30 m。质量 kg的小球A静止在轨道上,另一质量m2=0.60 kg的小球B以水平速度v0= m/s与小球A正碰。已知相碰后小球A经过半圆的最高点c落至轨道上距b点为 R处,重力加速度g取10m/s2,求:
(1)碰撞结束时,小球A和B的速度大小;
(2)试论证小球B是否能沿着半圆轨道到达c点。
阅读快车系列答案
 B.
B. 
 . D.
. D. 
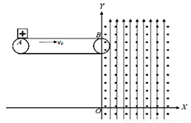
 =4m/s向右运动并与静止在小车最左端、质量也为m=1kg小物块Q发生弹性碰撞,小物块Q与小车上表面的动摩擦因数μ=0.3,
=4m/s向右运动并与静止在小车最左端、质量也为m=1kg小物块Q发生弹性碰撞,小物块Q与小车上表面的动摩擦因数μ=0.3,  ,求:
,求: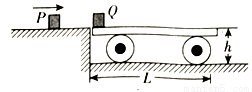
 m,倾角为
m,倾角为 =37°,且D是斜面的中点,在A点和D点分别以相同的初速度水平抛出一个小区,结果两个小球恰能落在地面上的同一点,则落地点到C点的水平距离为
=37°,且D是斜面的中点,在A点和D点分别以相同的初速度水平抛出一个小区,结果两个小球恰能落在地面上的同一点,则落地点到C点的水平距离为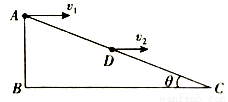
 B.
B.  C.
C.  D.
D. 
 ,测得物体A向右运动的最大距离为
,测得物体A向右运动的最大距离为 ,之后物体A被弹簧弹回最终停在距离初始位置左侧
,之后物体A被弹簧弹回最终停在距离初始位置左侧 处。已知弹簧始终在弹簧弹性限度内,物体A与水平面间的动摩擦因数为
处。已知弹簧始终在弹簧弹性限度内,物体A与水平面间的动摩擦因数为 ,重力加速度为g,下列说法中正确的是( )
,重力加速度为g,下列说法中正确的是( )



