题目内容
16.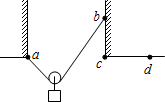 如图所示,将一根不可伸长、柔软的轻绳两端分别系于a、b两点,将一物体用动滑轮悬挂在绳子上,物体处于平衡时绳中的张力为T1.将绳子右端由b点移至其正下方的c点,整个系统重新达到平衡时绳中的张力为T2.再将绳子右端由c点水平向右移至d点,待系统再次达到平衡时绳中的张力为T3.不计一切摩擦,则( )
如图所示,将一根不可伸长、柔软的轻绳两端分别系于a、b两点,将一物体用动滑轮悬挂在绳子上,物体处于平衡时绳中的张力为T1.将绳子右端由b点移至其正下方的c点,整个系统重新达到平衡时绳中的张力为T2.再将绳子右端由c点水平向右移至d点,待系统再次达到平衡时绳中的张力为T3.不计一切摩擦,则( )| A. | T1>T2>T3 | B. | T1<T2<T3 | C. | T1=T2=T3 | D. | T1=T2<T3 |
分析 绳子右端从b移动到c点时,根据几何关系可以判断出,两个绳子之间的夹角不变,然后根据三力平衡条件判断出绳子拉力不变;绳子右端从c移动到d点时,绳子间夹角变大,再次根据共点力平衡条件判断.
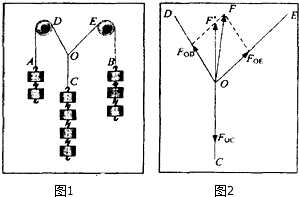
解答 解:设绳子结点为O,对其受力分析,当绳子右端从b移动到c点时,根据几何关系,两绳的夹角不变,
绳子的结点受重力和两个绳子的拉力,由于绳子夹角不变,根据三力平衡可知,绳子拉力不变,即T1=T2;
绳子右端从c移动到d点时,绳子间夹角显然变大,绳子的结点受重力和两个绳子的拉力,再次根据共点力
平衡条件可得T2<T3,故D正确,A、B、C错误.
故选:D.
点评 本题关键根据几何关系判断出两次移动过程中两绳子间夹角的变化情况,然后根据共点力平衡条件,运用合成法分析.

练习册系列答案
相关题目
6. 如图所示,用同样材料做成的A、B、c三个物体放在匀速转动的水平转台上随转台一起绕竖直轴转动.已知三物体质量间的关系ma=2mb=3mc,转动半径之间的关系是rC=2rA=2rB,那么以下说法中正确的是( )
如图所示,用同样材料做成的A、B、c三个物体放在匀速转动的水平转台上随转台一起绕竖直轴转动.已知三物体质量间的关系ma=2mb=3mc,转动半径之间的关系是rC=2rA=2rB,那么以下说法中正确的是( )
如图所示,用同样材料做成的A、B、c三个物体放在匀速转动的水平转台上随转台一起绕竖直轴转动.已知三物体质量间的关系ma=2mb=3mc,转动半径之间的关系是rC=2rA=2rB,那么以下说法中正确的是( )| A. | 物体A受到的摩擦力最大 | |
| B. | 物体B受到的摩擦力最小 | |
| C. | 物体C的向心加速度最大 | |
| D. | 转台转速加快时,物体B最先开始滑动 |
4.一根不可伸长的轻绳上端固定在天花板上的某点,下端系一小球,小球在水平面内做匀速圆周运动,此时小球运动的线速度为v1,角速度为ω1,周期为T1,轻绳的拉力为F1.若使小球在更高的水平面内做匀速圆周运动(绳长不变),此时小球运动的线速度为v2,角速度为ω2,周期为T2,轻绳的拉力为F2.则下列关系式正确的是( )
| A. | v1<v2 | B. | ω1=ω2 | C. | T1=T2 | D. | F1<F2 |
11. 如图所示,A、B为平行板电容器的金属板,G为静电计.开始时开关S闭合,静电计指针张开一角度.为了使指针张开的角度增大一些,应该采取的措施有( )
如图所示,A、B为平行板电容器的金属板,G为静电计.开始时开关S闭合,静电计指针张开一角度.为了使指针张开的角度增大一些,应该采取的措施有( )
如图所示,A、B为平行板电容器的金属板,G为静电计.开始时开关S闭合,静电计指针张开一角度.为了使指针张开的角度增大一些,应该采取的措施有( )| A. | 保持开关S闭合,将A、B两极板靠近一些 | |
| B. | 保持开关S闭合,将变阻器滑动触头向上移动 | |
| C. | 断开开关S之后,将A、B两极板错开一些 | |
| D. | 断开开关S之后,将A、B两极板分开一些 |
1.如图甲所示的电路是利用传感器来观察电容器的充电和放电,电源电动势为8V.先把单刀双掷开关S拨到1,经过较长一段时间后再拨到2,通过电流传感器将电流信息输入计算机,屏幕上显示出电流随时间变化的I-t图线,如图乙所示.则下列说法正确的是( )

| A. | 该图线是电这容器放电时的I-t图线 | |
| B. | 图乙中狭长矩形的面积表示这段时间内电阻R上产生的焦耳热 | |
| C. | 该电容器的电容约为4×10-4F | |
| D. | 若将电容器两极板间的距离适当增大,其他条件不变,重复实验后得到的I-t图线与图乙所示完全相同 |
1. 某火星探测器的发射过程的简化图如图所示,首先将该探侧器发射到一停泊测试轨道,使探测器沿椭圆环绕地球运行,其中图中的P点为椭圆轨道上的远地点;在经一系列的变轨进入工作轨道,使探测器在圆轨道上环绕火星运行.已知地球和火星的半径分别为R1,R2,P点距离地面的高度为h1,在工作轨道上探测器距离火星表面的高度为h2,地球表面的重力加速度为g,火星的质量为M,引力常量为G,忽略地球和火星自转的影响,根据以上信息可知( )
某火星探测器的发射过程的简化图如图所示,首先将该探侧器发射到一停泊测试轨道,使探测器沿椭圆环绕地球运行,其中图中的P点为椭圆轨道上的远地点;在经一系列的变轨进入工作轨道,使探测器在圆轨道上环绕火星运行.已知地球和火星的半径分别为R1,R2,P点距离地面的高度为h1,在工作轨道上探测器距离火星表面的高度为h2,地球表面的重力加速度为g,火星的质量为M,引力常量为G,忽略地球和火星自转的影响,根据以上信息可知( )
某火星探测器的发射过程的简化图如图所示,首先将该探侧器发射到一停泊测试轨道,使探测器沿椭圆环绕地球运行,其中图中的P点为椭圆轨道上的远地点;在经一系列的变轨进入工作轨道,使探测器在圆轨道上环绕火星运行.已知地球和火星的半径分别为R1,R2,P点距离地面的高度为h1,在工作轨道上探测器距离火星表面的高度为h2,地球表面的重力加速度为g,火星的质量为M,引力常量为G,忽略地球和火星自转的影响,根据以上信息可知( )| A. | 探测器在P点的线速度大小 | B. | 探测器在P点的加速度大小 | ||
| C. | 探侧器环绕火星运行的周期 | D. | 火星表面的重力加速度 |
2.下列关于矢量和标量的说法中正确的是( )
| A. | 矢量和标量没有严格的区别,同一个物理量可以是矢量,也可以是标量 | |
| B. | 矢量都是有方向的 | |
| C. | 时间、时刻、路程都是标量 | |
| D. | 速率是矢量 |