��Ŀ����
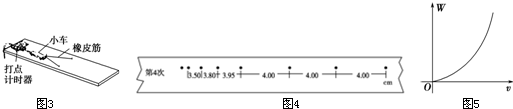
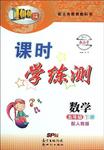
��1��ijͬѧ����ͼ1��ʾ��װ�ý��С���֤�����غ㶨�ɡ���ʵ�飺
���Ȳ������Ϊ�ʵ����������ͬ����A��B�������ֱ�Ϊm��M�������������Ķ�Ħ�������̣�
����ϸ�߽�����A��B���ӣ�ʹA��B����ᵯ�ɴ���ѹ��״̬������Bǡ�ý������ߣ�
�ۼ���ϸ�ߣ��������B��ƽ���˶���ˮƽλ��x1������A��ˮƽ���滬�о���Ϊx2��δ�������棩��
Ϊ��֤�����غ㶨�ɣ�д���������������������ʾ���ǵ���ĸ
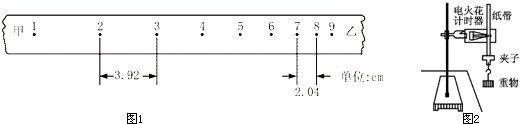
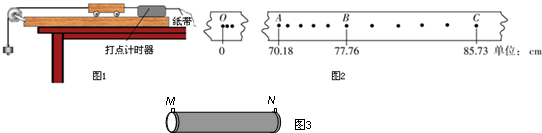
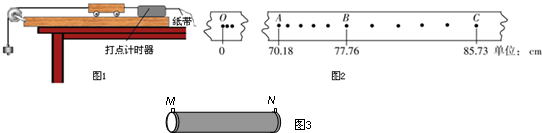
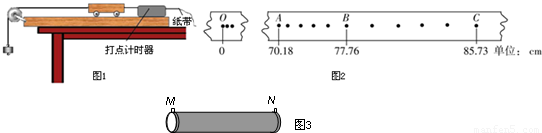
��2��ijʵ��С�������������������ٶȴ�����̽�����Ͷ��ܱ仯�Ĺ�ϵ����ͼ2��ʾ�����ǽ������������̶���С���ϣ��ò����쳤��ϸ�߽���ͨ��һ���������빳����������������������¼С���ܵ������Ĵ�С����ˮƽ���������50.0cm��A��B�������װһ���ٶȴ���������¼С��ͨ��A��Bʱ���ٶȴ�С��С���п��Է������룮
����ʵ����ľ������б��������Ŀ����
A����Ϊ��ʹ�ͷ�С����С�����ȼ����»�
B����Ϊ������С���»��ļ��ٶ�
C����ʹ��ϸ���������Ĺ����ں�����С�����Ĺ�
D����ʹ��С����δʩ������ʱ������ֱ���˶�
����ʵ����Ҫ�������£�
�ٲ���
�ڽ�С��ͣ��C�㣬��ͨ��Դ��
����С�����������룬�����ӹ���������ظ��ڵIJ�����
�����±������Dz�õ�һ�����ݣ�����M1�Ǵ�������С����С������������֮�ͣ�|v
-v
|�������ٶȴ�������¼�ٶȵ�ƽ������Ծݴ˼�������ܱ仯����E��F�������������ܵ���������W������F��A��B�������Ĺ��������С�E3=
���Ȳ������Ϊ�ʵ����������ͬ����A��B�������ֱ�Ϊm��M�������������Ķ�Ħ�������̣�
����ϸ�߽�����A��B���ӣ�ʹA��B����ᵯ�ɴ���ѹ��״̬������Bǡ�ý������ߣ�
�ۼ���ϸ�ߣ��������B��ƽ���˶���ˮƽλ��x1������A��ˮƽ���滬�о���Ϊx2��δ�������棩��
Ϊ��֤�����غ㶨�ɣ�д���������������������ʾ���ǵ���ĸ
����B����ĸ߶�h
����B����ĸ߶�h
����������غ㣬��Ҫ����Ĺ�ϵʽΪMx1
�Tm
|
| 2g��x2 |
Mx1
�Tm
��
|
| 2g��x2 |
��2��ijʵ��С�������������������ٶȴ�����̽�����Ͷ��ܱ仯�Ĺ�ϵ����ͼ2��ʾ�����ǽ������������̶���С���ϣ��ò����쳤��ϸ�߽���ͨ��һ���������빳����������������������¼С���ܵ������Ĵ�С����ˮƽ���������50.0cm��A��B�������װһ���ٶȴ���������¼С��ͨ��A��Bʱ���ٶȴ�С��С���п��Է������룮
����ʵ����ľ������б��������Ŀ����
CD
CD
��A����Ϊ��ʹ�ͷ�С����С�����ȼ����»�
B����Ϊ������С���»��ļ��ٶ�
C����ʹ��ϸ���������Ĺ����ں�����С�����Ĺ�
D����ʹ��С����δʩ������ʱ������ֱ���˶�
����ʵ����Ҫ�������£�
�ٲ���
��������
��������
��������������������M1����ϸ�ߵ�һ�˹̶��������������ϣ���һ��ͨ���������빳����������ȷ���������·���ڽ�С��ͣ��C�㣬��ͨ��Դ��
��ֹ�ͷ�С��
��ֹ�ͷ�С��
��С����ϸ���������˶�����¼ϸ��������С��ͨ��A��Bʱ���ٶȣ�����С�����������룬�����ӹ���������ظ��ڵIJ�����
�����±������Dz�õ�һ�����ݣ�����M1�Ǵ�������С����С������������֮�ͣ�|v
2 2 |
2 1 |
0.600
0.600
��W3=0.610
0.610
�����������λ��Ч���֣���| ���� | M1/kg | |v
|
��E/J | F/N | W/J | ||||
| 1 | 0.500 | 0.760 | 0.190 | 0.400 | 0.200 | ||||
| 2 | 0.500 | 1.65 | 0.413 | 0.840 | 0.420 | ||||
| 3 | 0.500 | 2.40 | ��E3 | 1.220 | W3 | ||||
| 4 | 1.000 | 2.40 | 1.20 | 2.420 | 1.21 | ||||
| 5 | 1.000 | 2.84 | 1.42 | 2.860 | 1.43 |
��������1��Ҫ��֤�����غ㣬����Ҫ֪��ϸ����ǰ��Ķ���������Ҫ�����������������������ϸ�ߺ���������ٶȣ�����ϸ�ߺ�B��ƽ���˶���Ҫ��B�ij��ٶȣ���Ҫ֪���˶��ĸ߶Ⱥ�ˮƽ���룬A���ȼ����˶��������˶�ѧ������ʽ����ٶȣ�
��2��С���ڹ�����������϶�ֽ����ˮƽ�����������˶���ͨ���ٶȴ����������A B������ٶȴ�С��ͬʱ����������������������С���������Ӷ���AB���ȿ�����������Ĺ���С���Ķ��ܱ仯��ϵ��
��2��С���ڹ�����������϶�ֽ����ˮƽ�����������˶���ͨ���ٶȴ����������A B������ٶȴ�С��ͬʱ����������������������С���������Ӷ���AB���ȿ�����������Ĺ���С���Ķ��ܱ仯��ϵ��
����⣺��1������ϸ�ߺ�B��ƽ���˶���Ҫ��B�ij��ٶȣ���Ҫ֪���˶��ĸ߶Ⱥ�ˮƽ���룬���Ի���Ҫ�������������ĸ߶�h��
��������غ㣬�����ϸ��ǰ������ȣ�����ǰ�������ٶȶ�Ϊ�㣬�����ܶ���Ϊ�㣬
���Ϻ�B��ƽ���˶���t=
��vB=
=x1
��
A���ȼ���ֱ���˶������ݶ��ܶ����ã�-��Mgx2=-
MvA2�����vA=
��
���Ա�������Ĺ�ϵΪMvA=mvB
�������ݵã�Mx1
�Tm
��
��2������ʵ����ľ������б��Ŀ����ƽ��Ħ������ʹ��ϸ�ߵ���������С���ĺ�������ʩ������ʱ��С����������ֱ���˶��������������ں�����������C��D��ȷ��A��B����
��ѡCD��
����ʵ��ǰ�����С������������������������������Ƚ�ͨ��Դ���پ�ֹ�ͷ�С����ʹ��С��������Ϊ�㣮
�����ɸ������ݿɼ����ɡ�E=
M1��v22-v12��
�ɵá�E3=0.600 J
�۲�F-W���ݹ��ɿɵ���ֵ��W3=F?L=0.610 J
�ʴ�Ϊ����1������B����ĸ߶� Mx1
�Tm
��2������CD
����С�������� ��ֹ�ͷ�С��
����0.600��0.610
��������غ㣬�����ϸ��ǰ������ȣ�����ǰ�������ٶȶ�Ϊ�㣬�����ܶ���Ϊ�㣬
���Ϻ�B��ƽ���˶���t=
|
| x1 |
| t |
|
A���ȼ���ֱ���˶������ݶ��ܶ����ã�-��Mgx2=-
| 1 |
| 2 |
| 2��gx2 |
���Ա�������Ĺ�ϵΪMvA=mvB
�������ݵã�Mx1
|
| 2g��x2 |
��2������ʵ����ľ������б��Ŀ����ƽ��Ħ������ʹ��ϸ�ߵ���������С���ĺ�������ʩ������ʱ��С����������ֱ���˶��������������ں�����������C��D��ȷ��A��B����
��ѡCD��
����ʵ��ǰ�����С������������������������������Ƚ�ͨ��Դ���پ�ֹ�ͷ�С����ʹ��С��������Ϊ�㣮
�����ɸ������ݿɼ����ɡ�E=
| 1 |
| 2 |
�ɵá�E3=0.600 J
�۲�F-W���ݹ��ɿɵ���ֵ��W3=F?L=0.610 J
�ʴ�Ϊ����1������B����ĸ߶� Mx1
|
| 2g��x2 |
��2������CD
����С�������� ��ֹ�ͷ�С��
����0.600��0.610
�������������Ĺؼ�֪��ʵ���ԭ����Χ��ʵ���ԭ�����з�����

��ϰ��ϵ�д�
 ����ѧ���ʱѧ����ϵ�д�
����ѧ���ʱѧ����ϵ�д�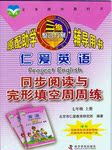 �ʰ�Ӣ��ͬ����ϰ��ϵ�д�
�ʰ�Ӣ��ͬ����ϰ��ϵ�д�
�����Ŀ