题目内容
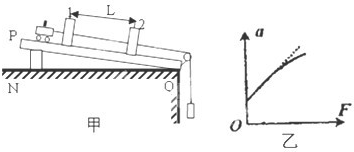
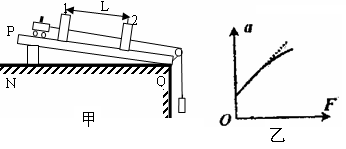
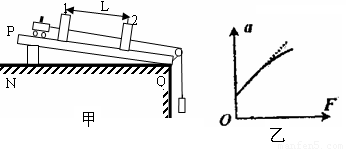
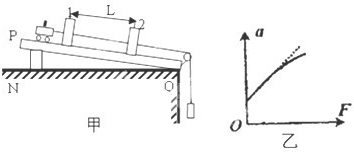
 光电门传感器也是一种研究物体运动情况的计时仪器,现利用图甲所示装置设计一个“验证物体产生的加速度与合外力、质量关系”的实验,图中NO是水平桌面,PO是一端带有滑轮的长木板,1、2是固定在木板上的两个光电门.小车上固定着用于挡光的窄片,让小车从木板的顶端滑下,光电门连接数据采集器,并把数据采集器和计算机连接,打开软件.
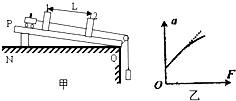
光电门传感器也是一种研究物体运动情况的计时仪器,现利用图甲所示装置设计一个“验证物体产生的加速度与合外力、质量关系”的实验,图中NO是水平桌面,PO是一端带有滑轮的长木板,1、2是固定在木板上的两个光电门.小车上固定着用于挡光的窄片,让小车从木板的顶端滑下,光电门连接数据采集器,并把数据采集器和计算机连接,打开软件.①已知窄片的宽度为d(L远大于d),计算机显示的光电门1、2的挡光时间分别为t1、t2.②用米尺测量光电门间距为L,则小车的加速度表达式a=
(
| ||||||||
| 2L |
(
| ||||||||
| 2L |
调出一个合适的斜面,轻推小车,使小车恰好能匀速下滑
调出一个合适的斜面,轻推小车,使小车恰好能匀速下滑
.④该实验中,让小车质量M不变时,探究a与F 关系,使用的探究方法是
控制变量法
控制变量法
.有位同学通过测量,作出a-F图线,如图乙中的实线所示.试分析:乙图线不通过坐标原点的原因是
木板夹角过大
木板夹角过大
;乙图线上部弯曲的原因是没有满足小车质量远大于砂和砂桶的质量
没有满足小车质量远大于砂和砂桶的质量
.分析:(1)根据运动学公式v2-
=2as,可以写出加速度的表达式;
(2)在研究物体的“加速度、作用力和质量”三个物理量的关系时,由于变量较多,因此采用了“控制变量法”进行研究.
(3)根据牛顿第二定律结合图象特点即可正确解答.
| v | 2 0 |
(2)在研究物体的“加速度、作用力和质量”三个物理量的关系时,由于变量较多,因此采用了“控制变量法”进行研究.
(3)根据牛顿第二定律结合图象特点即可正确解答.
解答:解:②由于窄片K的宽度为d很小,因此可以利用其平均速度代替物体的瞬时速度,
故窄片K通过光电门1的速度表达式为:v1=
窄片K通过光电门2的速度表达式:v2=
根据运动学公式:v2-
=2as有:a=
=
③所用导轨摩擦力较大,必须平衡摩擦力,方法是调出一个合适的斜面,轻推小车,使小车恰好能匀速下滑.
④在研究物体的“加速度、作用力和质量”三个物理量的关系时,由于变量较多,因此采用了“控制变量法”进行研究.探究a与F关系时,保持小车的质量m一定,研究a与F的关系.
根据乙图可知,当没有挂砂和砂桶时,小车产生了加速度,因此说明平衡摩擦力时木板倾角太大;
随着F的增大,即砂和砂桶质量的增大,不在满足砂和砂桶远小于小车的质量,因此曲线上部出现弯曲现象.
故答案为:②a=
③调出一个合适的斜面,轻推小车,使小车恰好能匀速下滑;④控制变量法;平衡摩擦力时木板倾角太大,没有满足小车质量远大于砂和砂桶的质量
故窄片K通过光电门1的速度表达式为:v1=
| d |
| t1 |
窄片K通过光电门2的速度表达式:v2=
| d |
| t2 |
根据运动学公式:v2-
| v | 2 0 |
| ||||
| 2L |
| ||||||||
| 2L |
③所用导轨摩擦力较大,必须平衡摩擦力,方法是调出一个合适的斜面,轻推小车,使小车恰好能匀速下滑.
④在研究物体的“加速度、作用力和质量”三个物理量的关系时,由于变量较多,因此采用了“控制变量法”进行研究.探究a与F关系时,保持小车的质量m一定,研究a与F的关系.
根据乙图可知,当没有挂砂和砂桶时,小车产生了加速度,因此说明平衡摩擦力时木板倾角太大;
随着F的增大,即砂和砂桶质量的增大,不在满足砂和砂桶远小于小车的质量,因此曲线上部出现弯曲现象.
故答案为:②a=
(
| ||||||||
| 2L |
点评:对于实验问题一定要明确实验原理,并且亲自动手实验,熟练应用所学基本规律解决实验问题.

练习册系列答案
 阅读快车系列答案
阅读快车系列答案
相关题目