题目内容
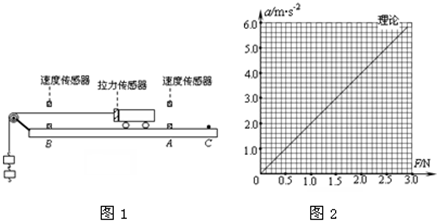
如图1为用拉力传感器和速度传感器探究“加速度与物体受力的关系”实验装置.用拉力传感器记录小车受到拉力的大小,在长木板上相距L=48.00cm的A、B两点各安装一个速度传感器,分别记录小车到达A、B时的速率.
实验主要步骤如下:
①将拉力传感器固定在小车上;
②平衡摩擦力,让小车做匀速直线运动;
③把细线的一端固定在拉力传感器上,另一端通过定滑轮与钩码相连;
④接通电源后自C点释放小车,小车在细线拉动下运动,记录细线拉力F的大小及小车分别到达A、B时的速率vA、vB;
⑤改变所挂钩码的数量,重复④的操作.
(1)表中记录了实验测得的几组数据,
-
是两个速度传感器记录速率的平方差,请将表中第3次的实验数据填写完整(结果保留三位有效数字)(请写在答题纸的横线上);
(2)依据表中数据,在坐标纸上作出a~F关系图线;
(3)比较实验结果与理论计算得到的关系图线(图2中已画出理论图线),造成上述偏差的原因是
实验主要步骤如下:
①将拉力传感器固定在小车上;
②平衡摩擦力,让小车做匀速直线运动;
③把细线的一端固定在拉力传感器上,另一端通过定滑轮与钩码相连;
④接通电源后自C点释放小车,小车在细线拉动下运动,记录细线拉力F的大小及小车分别到达A、B时的速率vA、vB;
⑤改变所挂钩码的数量,重复④的操作.
(1)表中记录了实验测得的几组数据,
| v | 2 B |
| v | 2 A |
| 次数 | F/N |
|
a(m/s2) | ||||
| 1 | 0.60 | 0.77 | 0.80 | ||||
| 2 | 1.04 | 1.61 | 1.68 | ||||
| 3 | 1.42 | 2.34 | 2.44 2.44 | ||||
| 4 | 2.62 | 4.65 | 4.84 | ||||
| 5 | 3.00 | 5.49 | 5.72 |
(3)比较实验结果与理论计算得到的关系图线(图2中已画出理论图线),造成上述偏差的原因是
没有完全平衡摩擦力或拉力传感器读数偏大
没有完全平衡摩擦力或拉力传感器读数偏大
.分析:(1)根据运动学公式中速度和位移的关系可以写出正确的表达式,带入即可求解;
(2)利用描点法可正确画出图象;
(3)对比实际与理论图象可知,有外力时还没有加速度,由此可得出产生偏差原因.
(2)利用描点法可正确画出图象;
(3)对比实际与理论图象可知,有外力时还没有加速度,由此可得出产生偏差原因.
解答:解:(1)根据运动学公式v2-v02=2as有:a=
=
,带入数据解得:a=2.44m/s2.
(2)根据表中数据,得出图象如图所示:
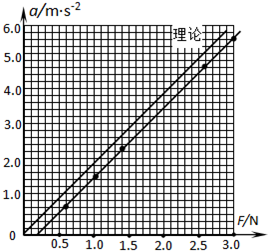
(3)对比图象可知,实际图象没有过原点而是和横坐标有交点,造成原因为没有完全平衡摩擦力或拉力传感器读数偏大.
故答案为:(1)2.44; (2)如图所示 (3)没有完全平衡摩擦力或拉力传感器读数偏大
| v2-v02 |
| 2s |
| vB2-vA2 |
| 2L |
(2)根据表中数据,得出图象如图所示:
(3)对比图象可知,实际图象没有过原点而是和横坐标有交点,造成原因为没有完全平衡摩擦力或拉力传感器读数偏大.
故答案为:(1)2.44; (2)如图所示 (3)没有完全平衡摩擦力或拉力传感器读数偏大
点评:明确实验原理,正确进行误差分析和数据处理是对学生学习实验的基本要求,要加强这方面的训练.

练习册系列答案
相关题目

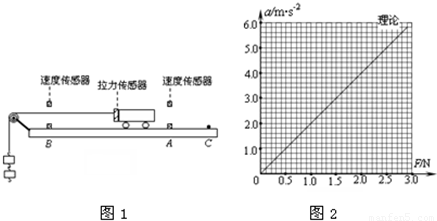
如图1为用拉力传感器和速度传感器探究“加速度与物体受力的关系”实验装置.用拉力传感器记录小车受到拉力的大小,在长木板上相距L=48.00cm的A、B两点各安装一个速度传感器,分别记录小车到达A、B时的速率.
实验主要步骤如下:
①将拉力传感器固定在小车上;
②平衡摩擦力,让小车做匀速直线运动;
③把细线的一端固定在拉力传感器上,另一端通过定滑轮与钩码相连;
④接通电源后自C点释放小车,小车在细线拉动下运动,记录细线拉力F的大小及小车分别到达A、B时的速率vA、vB;
⑤改变所挂钩码的数量,重复④的操作.
(1)表中记录了实验测得的几组数据, 是两个速度传感器记录速率的平方差,请将表中第3次的实验数据填写完整(结果保留三位有效数字)(请写在答题纸的横线上);
是两个速度传感器记录速率的平方差,请将表中第3次的实验数据填写完整(结果保留三位有效数字)(请写在答题纸的横线上);
(2)依据表中数据,在坐标纸上作出a~F关系图线;
(3)比较实验结果与理论计算得到的关系图线(图2中已画出理论图线),造成上述偏差的原因是______.
实验主要步骤如下:
①将拉力传感器固定在小车上;
②平衡摩擦力,让小车做匀速直线运动;
③把细线的一端固定在拉力传感器上,另一端通过定滑轮与钩码相连;
④接通电源后自C点释放小车,小车在细线拉动下运动,记录细线拉力F的大小及小车分别到达A、B时的速率vA、vB;
⑤改变所挂钩码的数量,重复④的操作.
(1)表中记录了实验测得的几组数据,
是两个速度传感器记录速率的平方差,请将表中第3次的实验数据填写完整(结果保留三位有效数字)(请写在答题纸的横线上);| 次数 | F/N |  (m3/s3) (m3/s3) | a(m/s2) |
| 1 | 0.60 | 0.77 | 0.80 |
| 2 | 1.04 | 1.61 | 1.68 |
| 3 | 1.42 | 2.34 | ______ |
| 4 | 2.62 | 4.65 | 4.84 |
| 5 | 3.00 | 5.49 | 5.72 |
(3)比较实验结果与理论计算得到的关系图线(图2中已画出理论图线),造成上述偏差的原因是______.
如图1为用拉力传感器和速度传感器探究“加速度与物体受力的关系”实验装置.用拉力传感器记录小车受到拉力的大小,在长木板上相距L=48.0cm的A、B两点各安装一个速度传感器,分别记录小车到达A、B时的速率.

(1)实验主要步骤如下:
①将拉力传感器固定在小车上;
②平衡摩擦力,让小车在没有拉力作用时能做 运动;
③把细线的一端固定在拉力传感器上,另一端通过定滑轮与钩码相连;
④接通电源后自C点释放小车,小车在细线拉动下运动,记录细线拉力F的大小及小车分别到达A、B时的速率vA、vB;
⑤改变所挂钩码的数量,重复④的操作.
(2)下表中记录了实验测得的几组数据, 是两个速度传感器记录速率的平方差,则加速度的表达式a= ,请将表中第3次的实验数据填写完整(结果保留三位有效数字);
是两个速度传感器记录速率的平方差,则加速度的表达式a= ,请将表中第3次的实验数据填写完整(结果保留三位有效数字);
(3)由表中数据,在图2坐标纸上作出a~F关系图线;
(4)对比实验结果与理论计算得到的关系图线(图2中已画出理论图线),造成上述偏差的原因是 .
(1)实验主要步骤如下:
①将拉力传感器固定在小车上;
②平衡摩擦力,让小车在没有拉力作用时能做 运动;
③把细线的一端固定在拉力传感器上,另一端通过定滑轮与钩码相连;
④接通电源后自C点释放小车,小车在细线拉动下运动,记录细线拉力F的大小及小车分别到达A、B时的速率vA、vB;
⑤改变所挂钩码的数量,重复④的操作.
(2)下表中记录了实验测得的几组数据,
是两个速度传感器记录速率的平方差,则加速度的表达式a= ,请将表中第3次的实验数据填写完整(结果保留三位有效数字);| 次数 | F(N) |  (m2/s2) (m2/s2) | a(m/s2) |
| 1 | 0.60 | 0.77 | 0.80 |
| 2 | 1.04 | 1.61 | 1.68 |
| 3 | 1.42 | 2.34 | 2.44 |
| 4 | 2.62 | 4.65 | 4.84 |
| 5 | 3.00 | 5.49 | 5.72 |
(4)对比实验结果与理论计算得到的关系图线(图2中已画出理论图线),造成上述偏差的原因是 .
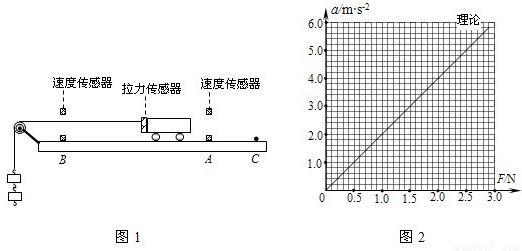
如图1为用拉力传感器和速度传感器探究“加速度与物体受力的关系”实验装置.用拉力传感器记录小车受到拉力的大小,在长木板上相距L=48.0cm的A、B两点各安装一个速度传感器,分别记录小车到达A、B时的速率.
(1)实验主要步骤如下:
①将拉力传感器固定在小车上;
②平衡摩擦力,让小车在没有拉力作用时能做 运动;
③把细线的一端固定在拉力传感器上,另一端通过定滑轮与钩码相连;
④接通电源后自C点释放小车,小车在细线拉动下运动,记录细线拉力F的大小及小车分别到达A、B时的速率vA、vB;
⑤改变所挂钩码的数量,重复④的操作.
(2)下表中记录了实验测得的几组数据, 是两个速度传感器记录速率的平方差,则加速度的表达式a= ,请将表中第3次的实验数据填写完整(结果保留三位有效数字);
是两个速度传感器记录速率的平方差,则加速度的表达式a= ,请将表中第3次的实验数据填写完整(结果保留三位有效数字);
(3)由表中数据,在图2坐标纸上作出a~F关系图线;
(4)对比实验结果与理论计算得到的关系图线(图2中已画出理论图线),造成上述偏差的原因是 .
(1)实验主要步骤如下:
①将拉力传感器固定在小车上;
②平衡摩擦力,让小车在没有拉力作用时能做 运动;
③把细线的一端固定在拉力传感器上,另一端通过定滑轮与钩码相连;
④接通电源后自C点释放小车,小车在细线拉动下运动,记录细线拉力F的大小及小车分别到达A、B时的速率vA、vB;
⑤改变所挂钩码的数量,重复④的操作.
(2)下表中记录了实验测得的几组数据,
是两个速度传感器记录速率的平方差,则加速度的表达式a= ,请将表中第3次的实验数据填写完整(结果保留三位有效数字);| 次数 | F(N) |  (m2/s2) (m2/s2) | a(m/s2) |
| 1 | 0.60 | 0.77 | 0.80 |
| 2 | 1.04 | 1.61 | 1.68 |
| 3 | 1.42 | 2.34 | 2.44 |
| 4 | 2.62 | 4.65 | 4.84 |
| 5 | 3.00 | 5.49 | 5.72 |
(4)对比实验结果与理论计算得到的关系图线(图2中已画出理论图线),造成上述偏差的原因是 .