搜索
下列现象中能说明物质的分子在不停的做无规则运动的是
A.
桂花飘香
B.
尘土满天
C.
烟雾缭绕
D.
柳絮飞扬
据报道,有一天在某工地上,工人在一幢高190m的大楼上施工时,一大片乌云飞快地 飘过大楼的上空,突然有人惊呼“楼要倒了“,引起数千人惊叫狂奔.造成这种错觉的原因是这些人以________为参照物,所以他们以为大楼是________(选填“运动“或“静止”的).
如图所示,电源电压为12V,并且保持不变,滑动变阻器的最大阻值为18Ω,小灯泡标有“6V 3W”字样.注意:请你分析并画出相应的等效电路图.
(1)灯泡正常工作时的电阻和电流各为多少?
(2)当S闭合,S
1
,S
2
都断开,灯泡正常工作时,滑动变阻器接入电路中的阻值为多大?
(3)保持滑片位置不变,闭合S、S
1
、S
2
,电流表示数变化了2A,R
0
的阻值是多少?
在四川抗震救灾中,一架号称“空中巨无霸”的米-26重型运输直升机,通过钢缆和机身相连,一次将一台13.2吨的挖掘机,空运到唐家山堰塞湖坝顶参加抢险.(g=10N/㎏,不计空气阻力)
(1)当直升机吊着挖掘机在空中匀速飞行1分钟(如图所示),它在水平方向前进了900米,那么它的速度为________米/秒.
(2)到达目的地下降过程中,坐在直升机里的人看见地面在迅速上升,他选择的参照物是________.若挖掘机的履带与地面的总接触面积是1.5米
2
,则对水平地面的压强是________帕.
港务局一装卸工人用如图所示的滑轮组匀速提升质量为80kg的货物,所用的拉力F为500N,绳子自由端在50s内被匀速拉下4m,求:(g取10N/kg)
(1)提升时绳子自由端的速度.(2)拉力F的功率.(3)此滑轮组的机械效率.
2012年6月5日世界环境日的主题是“绿色经济,你参与了吗”,旨在推动人们思考如何让绿色经济深入到日常生活的方方面面,唤起社会公众转变消费观念和行为,从而节约资源能源,保护生态环境.下列做法中符合这一理念的是
A.
上学时能骑自行车就尽量不坐汽车
B.
大力发展以煤为燃料的火力发电
C.
课本用旧了立刻更换新的
D.
为了方便而购买、使用一次性塑料袋
瓶子的质量为300g,装满水后总重量为7.84N,倒掉水后装满某种液体后总重为11.76N,这种液体的密度是多少?
如图所示的电路,当在AB两点间接一只10Ω的电阻时,电流表的示数为0.5A.在AB两点间换接一只20Ω的电阻,此时电流表的示数为
A.
等于0.25A
B.
小于0.25A
C.
大于0.25A
D.
因R
0
未知,故无法确定
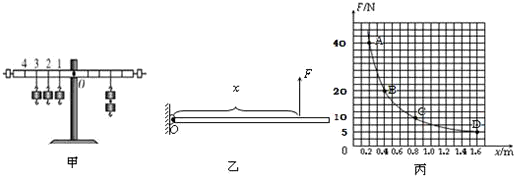
(1)某小组研究“杠杆的使用特点”,器材:有刻度的杠杆、若干个相同的钩码、弹簧测力计等,O为杠杆的支点.实验中,在杠杆P点上挂三个相同的钩码,先后四次用弹簧测力计在Q位置沿不同方向向下拉杠杆,如图甲中A、B、C、D 所示,每次都能使杠杆在水平位置平衡.若以测力计的拉力为动力F
1
,钩码对杠杆的作用力为阻力F
2
,“动力的方向”用QR连线与测力计拉力方向所组成的夹角θ表示,且0°<θ≤90°.请仔细观察图甲中的操作和测量结果,然后归纳结论.
①实验前,应先调节杠杆在________位置平衡.这样做,除了可以消除自身的重力影响,还可以方便地测量或读出________.调节时,如发现杠杆左端偏高,应如何操作:________.
②分析比较图甲(A)、(B)与(D)的操作和弹簧测力计指针的位置,可得到的初步结论:阻力、阻力臂一定时,动力随动力臂增大而________(选填:增大或减小).
③分析比较图甲(A)、(B)、(C)和(D)的动力F
1
的大小与动力方向之间的关系,可得到的初步结论:________.
④某次实验中,用如图乙所示的方式悬挂钩码,杠杆也能水平平衡(杠杆上每格等距),但老师却往往提醒大家不要采用这种方式.这主要是以下哪种原因________(选填字母).
A.一个人无法独立操作 B.需要使用太多的钩码
C.力臂与杠杆不重合 D.力和力臂数目过多
(2)如图丙所示,长1.6m、粗细均匀的金属杆可以绕O点在竖直平面内自由转动,一个“拉力--位移传感器”竖直作用在杆上,并能使杆始终保持水平平衡.该传感器显示其拉力F与作用点到O点距离x的变化关系如图丁所示.由图可知金属杆重________N.
小青和小山用焦距相等的相同相机对远处的同学进行拍照,洗出的底片分别为右图所示则
A.
小山离被拍同学的距离近
B.
小青离被拍同学的距离近
C.
小青要使底片上的像与小山的一样大,小青移动位置后,镜头要往前伸
D.
小山要使底片上的像与小青的一样大,小山移动位置后,镜头要往后缩
0
8959
8967
8973
8977
8983
8985
8989
8995
8997
9003
9009
9013
9015
9019
9025
9027
9033
9037
9039
9043
9045
9049
9051
9053
9054
9055
9057
9058
9059
9061
9063
9067
9069
9073
9075
9079
9085
9087
9093
9097
9099
9103
9109
9115
9117
9123
9127
9129
9135
9139
9145
9153
235360
关 闭
试题分类
高中
数学
英语
物理
化学
生物
地理
初中
数学
英语
物理
化学
生物
地理
小学
数学
英语
其他
阅读理解答案
已回答习题
未回答习题
题目汇总
试卷汇总
 如图所示,电源电压为12V,并且保持不变,滑动变阻器的最大阻值为18Ω,小灯泡标有“6V 3W”字样.注意:请你分析并画出相应的等效电路图.
如图所示,电源电压为12V,并且保持不变,滑动变阻器的最大阻值为18Ω,小灯泡标有“6V 3W”字样.注意:请你分析并画出相应的等效电路图.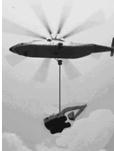 在四川抗震救灾中,一架号称“空中巨无霸”的米-26重型运输直升机,通过钢缆和机身相连,一次将一台13.2吨的挖掘机,空运到唐家山堰塞湖坝顶参加抢险.(g=10N/㎏,不计空气阻力)
在四川抗震救灾中,一架号称“空中巨无霸”的米-26重型运输直升机,通过钢缆和机身相连,一次将一台13.2吨的挖掘机,空运到唐家山堰塞湖坝顶参加抢险.(g=10N/㎏,不计空气阻力)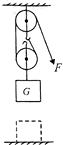 港务局一装卸工人用如图所示的滑轮组匀速提升质量为80kg的货物,所用的拉力F为500N,绳子自由端在50s内被匀速拉下4m,求:(g取10N/kg)
港务局一装卸工人用如图所示的滑轮组匀速提升质量为80kg的货物,所用的拉力F为500N,绳子自由端在50s内被匀速拉下4m,求:(g取10N/kg)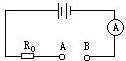 如图所示的电路,当在AB两点间接一只10Ω的电阻时,电流表的示数为0.5A.在AB两点间换接一只20Ω的电阻,此时电流表的示数为
如图所示的电路,当在AB两点间接一只10Ω的电阻时,电流表的示数为0.5A.在AB两点间换接一只20Ω的电阻,此时电流表的示数为
 小青和小山用焦距相等的相同相机对远处的同学进行拍照,洗出的底片分别为右图所示则
小青和小山用焦距相等的相同相机对远处的同学进行拍照,洗出的底片分别为右图所示则