题目内容
一根杠杆,动力臂与阻力臂之比是5:3,要使杠杆平衡,则动力和阻力之比为________.这是一个________杠杆.(省力、费力或等臂)
分析:从杠杆平衡条件中可以得出:力和力臂的大小成反比,即力臂越大,力就越小.
解答:(1)∵L1:L2=5:3,
∴由杠杆平衡原理:F1L1=F2L2得
 =3:5
=3:5(2)因为L1>L2,所以杠杆是省力杠杆.
故答案为:3:5,省力.
点评:从杠杆平衡条件中可以得出:力和力臂的大小成反比,即力臂越大,力就越小.这一结论对解决填空题、选择题能提高解题的效率.

 天天向上一本好卷系列答案
天天向上一本好卷系列答案 小学生10分钟应用题系列答案
小学生10分钟应用题系列答案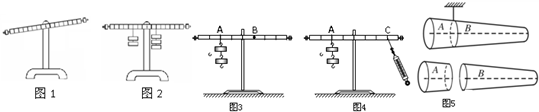
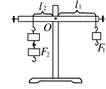
如图示,某小组研究“杠杆的平衡条件”,器材:有刻度的杠杆、若干个相同的钩码、弹簧测力计等,O为杠杆的支点。
①实验前,应先调节杠杆在 位置平衡。这样做,除了可以消除自身的重力影响,还可以方便地测量或读出 。调节时,如发现杠杆左端偏高,应如何操作: 。
②某实验小组记录两组数据如下:
| 实验序号 | 动力F1/N | 动力臂l1/cm | 阻力F2/N | 阻力臂l2/cm |
| 1 | 2 | 20 | 1 | 10 |
| 2 | 1 | 8 | 2 | 4 |
③如图所示,弹簧测力计在C处由竖直向上逐渐向右倾斜拉动杠杆,仍使杠杆在水平位置保持平衡,则弹簧测力计的示数将 (选填:变大、变小或保持不变),其原因是 。(2分)

④某次实验中,若采取如图所示的方式悬挂钩码,杠杆也能在水平位置保持平衡(杠杆上每格等距),但老师却往往提醒大家不要采用这种方式,这主要是以下哪种原因 (选填字母)。

A.一个人无法独立操作 B.需要使用太多的钩码
C.力臂与杠杆不重合 D.力和力臂数目过多
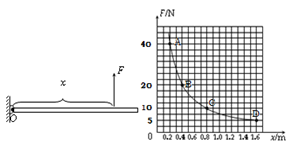
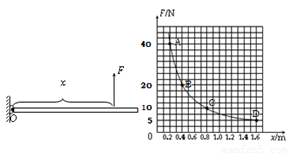
⑤如图所示,某实验小组选用长1.6m、可绕O点在竖直平面内自由转动且粗细均匀的一根金属杆,将一个“拉力——距离传感器”竖直装置在杆上,并使杠杆在水平位置始终保持平衡。该传感器显示其拉力F与作用点到O点距离x的变化关系如图所示。由图可知金属杆重 N。
如图示,某小组研究“杠杆的平衡条件”,器材:有刻度的杠杆、若干个相同的钩码、弹簧测力计等,O为杠杆的支点。
①实验前,应先调节杠杆在 位置平衡。这样做,除了可以消除自身的重力影响,还可以方便地测量或读出 。调节时,如发现杠杆左端偏高,应如何操作: 。
②某实验小组记录两组数据如下:
|
实验序号 |
动力F1/N |
动力臂l1/cm |
阻力F2/N |
阻力臂l2/cm |
|
1 |
2 |
20 |
1 |
10 |
|
2 |
1 |
8 |
2 |
4 |
根据分析,这组数据中,实验序号为 (选填:“1”或“2”)的一组肯定有错误。检查发现是测量动力臂时读错了,动力臂的实际值比记录值 (选填:大或小)。
③如图所示,弹簧测力计在C处由竖直向上逐渐向右倾斜拉动杠杆,仍使杠杆在水平位置保持平衡,则弹簧测力计的示数将 (选填:变大、变小或保持不变),其原因是 。(2分)

④某次实验中,若采取如图所示的方式悬挂钩码,杠杆也能在水平位置保持平衡(杠杆上每格等距),但老师却往往提醒大家不要采用这种方式,这主要是以下哪种原因 (选填字母)。

A.一个人无法独立操作 B.需要使用太多的钩码
C.力臂与杠杆不重合 D.力和力臂数目过多
⑤如图所示,某实验小组选用长1.6m、可绕O点在竖直平面内自由转动且粗细均匀的一根金属杆,将一个“拉力——距离传感器”竖直装置在杆上,并使杠杆在水平位置始终保持平衡。该传感器显示其拉力F与作用点到O点距离x的变化关系如图所示。由图可知金属杆重 N。
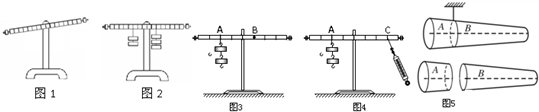
物理兴趣小组的同学,利用如图所示的装置,在杠杆支点的两边分别挂上钩码来探究杠杆的平衡条件.
(1)如图 1所示,为使杠杆在水平位置平衡,应将右端的平衡螺母向________(选填“左”或“右”)移动,将杠杆调在水平位置平衡的目的是为了方便测量________.
(2)实验中测得的数据如表所示,
| 测量 序号 | 动力 F1/N | 动力臂 l1/cm | 阻力 F2/N | 阻力臂 l2/cm |
| ① | 1 | 20 | 2 | 10 |
| ② | 2 | 15 | 1.5 | 20 |
| ③ | 3 | 5 | 15 |
(3)有的同学按现有方案得出如下结论:“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离”.这个结论与杠杆平衡条件不符,原因是实验过程中________(填字母).
A.没有改变力的大小 B.没有改变力的方向
C.没有改变力的作用点 D.实验次数较少,结论具有偶然性
(4)杠杆平衡后,小明在图3所示的A位置挂上两个钩码,可在B位置挂上________个钩码,使杠杆在水平位置平衡.
(5)他改用弹簧测力计在图4所示的C位置斜向下拉,若每个钩码重1N.当杠杆在水平位置平衡时,测力计的示数将________(选填“大于”、“等于”或“小于”)1N.
(6)用绳子拴住一根粗细不同的大树某处,静止后大树水平平衡,如图5所示.现将大树从拴绳处沿竖直方向切成A、B两段,根据图5可判断GA________GB(选填“>”、“=”或“<”).
二、要点梳理
- 对重力、弹力、摩擦力这三种力应从它们产生的条件及其三要素来掌握。其中特别注意以下几点:
- 重力:方向是竖直向下的含义即为垂直水平面向下,而且在任何情况下物体(处于斜面上的物体 、正在升空的物体等)受到重力的方向总是竖直向下。重心不一定都在物体上。
- 弹力的形式有很多,如推力、拉力、提力、压力等,切记压力、支持力的方向总是垂直于接触面。另外弹簧伸长与受到拉力的大小有关,弹簧受到的拉力越大,其伸长越长。这也是弹簧测力计的原理。
实测 物体 | 物体质量 m(kg) | 重力 G(N) | 比值G/m (N/kg) | 比值G/m的平均值 (N/kg) |
物体1 | 0.1 | 0.99 | 9.9 | |
物体2 | 0.2 | 1.96 | 9.8 | |
物体3 | 0.3 | 2.91 | 9.7 |
- 滑动摩擦力的大小仅由压力、接触面的粗糙程度决定,压力越大,接触面越粗糙,摩擦力越大,而与物体的运动速度、接触面积等因素无关。滑动摩擦力的方向总是与相对运动方向相反,但不一定与其运动方向相反。
2、受力分析是解决力学问题必备的一项最基本技能。①通常对物体进行受力分析的次序是按重力、弹力、摩擦力进行的;分析中要求做到不遗漏力,不多增力。②要做到不遗漏力,不多增力,可以从这几个方面着手:A按这些力的产生条件进行判断它们是否存在;B学会运用物体处于平衡时,应满足的力的平衡关系来确定一些力的存在以及大小。
3、杠杆的特征:①判断一个物体是不是杠杆,需要满足三个条件,即硬物体(不一定是棒)、受力(动力和阻力)和转动(绕固定点)。杠杆可以是直的也可以是弯的甚至是任意形状的,只要在力的作用下能绕固定点转动,且是硬物体,都可称为杠杆。②力臂的画法:确定支点O的位置;对杠杆进行受力分析,画出力的作用线;过支点向力的作用线作垂线。③因为使用任何机械都不能省功,因此既省力又省距离的杠杆是不存在的。
4、关于杠杆的平衡条件F1L1=F2L2;(1)杠杆平衡是指杠杆处于静止或匀速转动,不一定是水平位置静止。(2)应用杠杆平衡条件解题的三步骤①依题找出杠杆的五要素:支点、动力、阻力、动力臂、阻力臂。②明确题目给出的已知条件③根据平衡条件F1L1=F2L2列式求解。
5、滑轮组:①滑轮组用几段绳子吊着物体,提起物体所用的力就是物体与动滑轮总重量的几分之一,绳子自由端移动的距离就是物体升高高度的几倍。②承担总重量的“几段绳子”的确定:看直接与动滑轮接触的(包括栓在动滑轮框的)总共有几根。