��Ŀ����
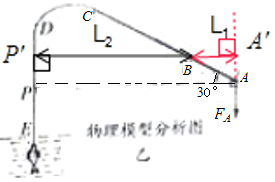
����Ŀ���������صĵ����ABCD���ڵ���ʱ�˵�ǰ��CD������Ȼ�������˵ĺ�ABC���ֱ���ֱ��״̬���龰��ͼ�ף�������ģ�ͷ���ͼ��ͼ�ң�һ��������ģ�ͣ�����FG��20N��ϵ�ڵ�����DE���¶ˣ���ģ�����û��ˮ�о�ֹʱ���ߵ�����FD��18N����ʱ��ABC������ˮƽ���30��ǣ�������һ������B�㣬һ������A�ˣ�A�˵���ֱ���ߵľ���AP��3.75m�������߶�A��ʩ����ֱ���µ�������FA����֪AB��![]() m��
m��

��1���������ģ�����ܵ��ĸ�����
��2���������ABCD�����ܸ��о�������B��Ϊ֧�㣬����������BA�䣨l1����������BP�䣨l2���������FA�Ĵ�С��
��3������A��Ϊ֧���о��ܸ�ABCD���ж����ֶ�B��ġ���̧����FB����ߵ�����FD�Ĵ�С��ϵ��˵�����ɡ�
���𰸡���1��2N����2��������BA�䣨l1��������BP�䣨l2����������FA�Ĵ�СΪ72N����3������A��Ϊ֧���о��ܸ�ABCD�����ֶ�B��ġ���̧����FB���ڵ��ߵ�����FD�����ɼ�������
��������
��1���������ģ�����ܵ��ĸ�����
��2�����۵Ļ����������ȸ��ݸܸ˵�ʾ��ͼ��ȷ���ܸ˵�֧�㡣��ȷ���������õ�����ķ��������������ߡ��۴�֧�������������������ߣ�֧�㵽����ľ���������ۡ�
���������ѧ֪ʶ��������ۺ������۵ij���Ȼ�����øܸ�ƽ���������FA�Ĵ�С��
��3������A��Ϊ֧���о��ܸ�ABCD���ҳ������ۺ������ۣ�Ȼ����ݸܸ�ƽ�������ж����ֶ�B��ġ���̧����FB����ߵ�����FD�Ĵ�С��ϵ��
��1��������ģ���������������ñ���ƽ�⣬
��������ƽ�������ɵã�F��+FD��FG��
���ԣ�������ģ�����ܵ��ĸ�����F����FG��FD��20N��18N��2N��
��2����֧��B���ֱ����������������������߶Σ����߶εij���Ϊ�����ۺ������ۣ���ͼ��ʾ��
��ABC������ˮƽ���30��ǣ�����BAP��30�㣬
���ABA�䣽��BAP��30�㣬
��ABA��Ϊֱ�������Σ�AB��![]() m��
m��
���ԣ�AA�䣽![]() AB��
AB��![]() ��
��![]() ��
��![]() m��
m��
�ɹ��ɶ����ã�BA�䣽![]() ��
��
����ͼ��֪BA��+BP�䣽AP��
����BP�䣽AP��BA�䣽3.75m��0.75m��3m��
���ݸܸ�ƽ�������ɵ�FABA�䣽FDBP�䣬
����FA��0.75m��18N��3m��
���FA��72N��
��3����AΪ֧�㣬����������B����
�ɸܸ�ƽ�������ɵ�FBLB��FDAP��
B�����������ΪAB����AP��LB��
���ԣ�FB��FD��








����Ŀ�������������������˻���չѸ�١�����������Ժ������ǿ���㷺Ӧ���ں�������ͨ�����ȷ��档��ͼ��ʾΪijƷ�����������˻���������4�����������������������ת�������·�����ʩ����ͬʱ��������������˻�����һ���ͷ�����������ͣ�ȹ��ܣ�Я������������Խ��и������㲢ʵʱ���źŴ���ң������ʾ��������ӵ��GPS���Ƕ�λϵͳ���±��Ǹ����˻��IJ��ֲ�����
�������� | 2kg | ��ض��ѹ | 15V |
�����ɺ��θ߶� | 5000m | ������� | 5000mAh |
��������ٶ� | 6m/s | �綯��������ѹ | 12V |
����½��ٶ� | 2m/s | ��ͣʱÿ���綯������ | 50W |
���ˮƽ�ٶ� | 16m/s | �綯������ | 4 |
��1�������������ݣ�����˵���в���ȷ����_____
A��ң�����˻������Ƕ�λ����ͨ����Ų���������Ϣ��B�����˻������˿����������ķ��������Ӷ��������
C�����˻����������ͼ��ʱ��С��ͣ�߶ȿ���ʹͼ����D�����˻�����ͣʱ�����ĵ���
��2���綯���ڹ���ʱҪ���������˵�ѹΪ12V���䣬ͨ�����ӵ���������Ƶ���������Ƶ綯���ĵ����Ӷ��ı�綯���Ĺ��ʣ�ÿһ���綯������һ���������ô�綯���͵�������ӷ�ʽ��_____��ѡ���������������,����Դ��ѹȫ�����ڵ綯���͵�������ˣ���綯���͵���Ĺ���֮��Ϊ_____��
��3���ڵ��������������£������˻�����ij�λ���Ŀ���ʱ����Ҫ�ӵ�����ɣ��ɵ����Ͽ�60�ߴ���Ȼ����ͣ�۲⣨���������ĸ��綯��ͬʱ���������������˻������Ժ������ǿ����һ���̿���Ϊ������ٶ�����ֱ���������Ҵﵽ60�ߴ�ʱ������ֹ����ͣ���������˻���ͣ�۲�10���ӣ��綯��������ת��Ϊ��е�ܵ�Ч��Ϊ90%�����˻��������������ܵ�����Ϊ10N��ͨ������ش��������⣺��gȡ10N/kg��

a������ɵ���ͣ�������綯�����Ķ��ٵ���________������������Ķ��ٵ���_________��
b�������˻���60�ߴ����ص����棬Ҫ������������ʣ��10%������������������ʧ�������˻������ͣ�۲���ܷ�ȫ���� ________��