题目内容
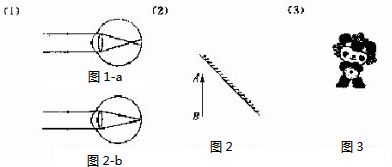
(1)请观察图1-a后,在图1-b中的适当位置处,画上矫正视力所需要的透镜.
(2)请在图2中画出物体AB在平面镜中的像A’B’(保留作图痕迹).
(3)请在图3中画出奥运吉祥物“福娃”所受重力示意图.

解:(1)图1-a会聚点在视网膜前,佩戴凹透镜做成的眼镜使会聚点后移到视网膜上;
如图所示:

(2)先作出物体AB端点A、B在平面镜中的对称点A′、B′,用虚线连接A′、B′即可得到AB的像,如图所示:

(3)“福娃”所受重力从其重心竖直向下画,并标出重力符号G,如图所示:

分析:(1)首先根据远处物体发射来的平行光会聚于视网膜前,说明是近视眼;然后根据凹透镜对光线有发散作用,根据需要佩戴凹透镜做成的眼镜.
(2)根据平面镜成像的特点:像与物关于平面镜对称,先作出物体AB端点A、B的像点,用虚线连接两个像点即为物体AB的像.
(3)首先知道重力的作用点在重心上,方向竖直向下;再用一条带箭头的线段把重力的三要素都表示出来.
点评:力的示意图是用一条带箭头的线段表示力,线段的长度表示力的大小,箭头表示力的方向,起点或终点表示力的作用点.
平面镜成像的特点:像与物到平面镜的距离相等、连线与镜面垂直、大小相等、左右相反;
凹透镜对光线有发散作用,而且有三条必须记住的特殊光线:过凹透镜光心的光线其传播方向不变;平行于主光轴的光线经凹透镜折射后折射光线反向延长通过焦点;指向另一侧焦点的光线经凹透镜折射后折射光线平行于主光轴.
如图所示:
(2)先作出物体AB端点A、B在平面镜中的对称点A′、B′,用虚线连接A′、B′即可得到AB的像,如图所示:
(3)“福娃”所受重力从其重心竖直向下画,并标出重力符号G,如图所示:
分析:(1)首先根据远处物体发射来的平行光会聚于视网膜前,说明是近视眼;然后根据凹透镜对光线有发散作用,根据需要佩戴凹透镜做成的眼镜.
(2)根据平面镜成像的特点:像与物关于平面镜对称,先作出物体AB端点A、B的像点,用虚线连接两个像点即为物体AB的像.
(3)首先知道重力的作用点在重心上,方向竖直向下;再用一条带箭头的线段把重力的三要素都表示出来.
点评:力的示意图是用一条带箭头的线段表示力,线段的长度表示力的大小,箭头表示力的方向,起点或终点表示力的作用点.
平面镜成像的特点:像与物到平面镜的距离相等、连线与镜面垂直、大小相等、左右相反;
凹透镜对光线有发散作用,而且有三条必须记住的特殊光线:过凹透镜光心的光线其传播方向不变;平行于主光轴的光线经凹透镜折射后折射光线反向延长通过焦点;指向另一侧焦点的光线经凹透镜折射后折射光线平行于主光轴.

练习册系列答案
 每课必练系列答案
每课必练系列答案
相关题目