题目内容
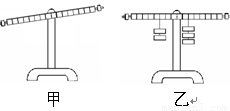
 我班物理兴趣小组的同学,利用如图所示的装置,在杠杆支点的两边分别挂上钩码来探究杠杆的平衡条件.
我班物理兴趣小组的同学,利用如图所示的装置,在杠杆支点的两边分别挂上钩码来探究杠杆的平衡条件.| 测量 序号 |
动力 F1/N |
动力臂 l1/cm |
阻力 F2/N |
阻力臂 l2/cm |
| ① | 1 | 20 | 2 | 10 |
| ② | 2 | 15 | 1.5 | 20 |
| ③ | 3 | 5 | 15 |
平衡
平衡
(选填“平衡”或“不平衡”)(2)为尽量减小杠杆自身的
重力
重力
对实验结果的影响,应使杠杆在水平位置平衡,如图甲中,应将右端的平衡螺母向右
右
(选填“左”或“右”)调节;将杠杆调在水平位置平衡还可以方便的测量力臂
力臂
.(3)实验中测得的数据如表所示,表格中漏填的数据为
1
1
N.(4)有的同学按现有方案得出如下结论:“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离”.这个结论与杠杆平衡条件不符,为解决本实验方案的这一不足,小刚同学用弹簧测力计替换了一组钩码,并使测力计的拉力方向
不在竖直方向
不在竖直方向
,使杠杆平衡,再做几组实验,即可得到验证.分析:(1)杠杆静止或绕支点匀速转动,杠杆处于平衡状态.
(2)为减小杠杆自重对实验的影响,实验时应调节杠杆在水平位置平衡;杠杆在水平位置平衡时,作用力与力臂处垂直,支点到力的作用点的距离是力的力臂,可以直接从杠杆上读取力臂.
(3)根据表中数据,应用杠杆平衡条件可以求出阻力.
(4)为得出普遍结论,用弹簧测力计拉杠杆,使力与力臂不垂直,多做几次实验,然后得出实验结论.
(2)为减小杠杆自重对实验的影响,实验时应调节杠杆在水平位置平衡;杠杆在水平位置平衡时,作用力与力臂处垂直,支点到力的作用点的距离是力的力臂,可以直接从杠杆上读取力臂.
(3)根据表中数据,应用杠杆平衡条件可以求出阻力.
(4)为得出普遍结论,用弹簧测力计拉杠杆,使力与力臂不垂直,多做几次实验,然后得出实验结论.
解答:解:(1)如图甲所示,杠杆静止,此时杠杆平衡.
(2)为尽量减小杠杆自身的重力对实验结果的影响,应使杠杆在水平位置平衡;
由图甲可知,杠杆左端下沉,应将右端的平衡螺母向右调节,使杠杆在平衡位置平衡;
杠杆在水平位置平衡,力与力臂垂直,可以方便地测量力臂.
(3)由杠杆平衡条件及第三组实验数据得:F1×L1=F2×L2,
即:3N×5cm=F2×15cm,则F2=1N;
(4)为得出普遍结论,用弹簧测力计替换了一组钩码,
并使测力计的拉力方向不在竖直方向,使杠杆平衡,再做几组实验.
故答案为:(1)平衡;(2)重力;右;力臂;(3)1;(4)不在竖直方向.
(2)为尽量减小杠杆自身的重力对实验结果的影响,应使杠杆在水平位置平衡;
由图甲可知,杠杆左端下沉,应将右端的平衡螺母向右调节,使杠杆在平衡位置平衡;
杠杆在水平位置平衡,力与力臂垂直,可以方便地测量力臂.
(3)由杠杆平衡条件及第三组实验数据得:F1×L1=F2×L2,
即:3N×5cm=F2×15cm,则F2=1N;
(4)为得出普遍结论,用弹簧测力计替换了一组钩码,
并使测力计的拉力方向不在竖直方向,使杠杆平衡,再做几组实验.
故答案为:(1)平衡;(2)重力;右;力臂;(3)1;(4)不在竖直方向.
点评:知道杠杆平衡的概念、知道实验注意事项、熟练应用杠杆平衡条件,即可正确解题.

练习册系列答案
 全程金卷系列答案
全程金卷系列答案
相关题目
我班物理兴趣小组的同学,利用如图所示的装置,在杠杆支点的两边分别挂上钩码来探究杠杆的平衡条件.(每空1分,共6分)
| 测量 序号 | 动力 F1/N | 动力臂 l1/cm | 阻力 F2/N | 阻力臂 l2/cm |
| ① | 1 | 20 | 2 | 10 |
| ② | 2 | 15 | 1.5 | 20 |
| ③ | 3 | 5 | | 15 |
(1)若杠杆静止在如图甲所示的位置,此时杠杆平衡吗?_________(选填“平衡”或“不平衡”)
(2)为尽量减小杠杆自身的__________对实验结果的影响,应使杠杆在水平位置平衡,如图甲中,应将右端的平衡螺母向_________(选填“左”或“右”)调节;将杠杆调在水平位置平衡还可以方便的测量__________.
(3)实验中测得的数据如表所示,表格中漏填的数据为________N.
(4)有的同学按现有方案得出如下结论:“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离”.这个结论与杠杆平衡条件不符,为解决本实验方案的这一不足,小刚同学用弹簧测力计替换了一组钩码,并使测力计的拉力方向 _________________,使杠杆平衡,再做几组实验,即可得到验证。

我班物理兴趣小组的同学,利用如图所示的装置,在杠杆支点的两边分别挂上钩码来探究杠杆的平衡条件.(每空1分,共6分)

|
测量 序号 |
动力 F1/N |
动力臂 l1/cm |
阻力 F2/N |
阻力臂 l2/cm |
|
① |
1 |
20 |
2 |
10 |
|
② |
2 |
15 |
1.5 |
20 |
|
③ |
3 |
5 |
|
15 |
(1)若杠杆静止在如图甲所示的位置,此时杠杆平衡吗?_________(选填“平衡”或“不平衡”)
(2)为尽量减小杠杆自身的__________对实验结果的影响,应使杠杆在水平位置平衡,如图甲中,应将右端的平衡螺母向_________(选填“左”或“右”)调节;将杠杆调在水平位置平衡还可以方便的测量__________.
(3)实验中测得的数据如表所示,表格中漏填的数据为________N.
(4)有的同学按现有方案得出如下结论:“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离”.这个结论与杠杆平衡条件不符,为解决本实验方案的这一不足,小刚同学用弹簧测力计替换了一组钩码,并使测力计的拉力方向 _________________,使杠杆平衡,再做几组实验,即可得到验证。
我班物理兴趣小组的同学,利用如图所示的装置,在杠杆支点的两边分别挂上钩码来探究杠杆的平衡条件.
(1)若杠杆静止在如图甲所示的位置,此时杠杆平衡吗?______(选填“平衡”或“不平衡”)
(2)为尽量减小杠杆自身的______对实验结果的影响,应使杠杆在水平位置平衡,如图甲中,应将右端的平衡螺母向______(选填“左”或“右”)调节;将杠杆调在水平位置平衡还可以方便的测量______.
(3)实验中测得的数据如表所示,表格中漏填的数据为______N.
(4)有的同学按现有方案得出如下结论:“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离”.这个结论与杠杆平衡条件不符,为解决本实验方案的这一不足,小刚同学用弹簧测力计替换了一组钩码,并使测力计的拉力方向______,使杠杆平衡,再做几组实验,即可得到验证.

| 测量 序号 | 动力 F1/N | 动力臂 l1/cm | 阻力 F2/N | 阻力臂 l2/cm |
| ① | 1 | 20 | 2 | 10 |
| ② | 2 | 15 | 1.5 | 20 |
| ③ | 3 | 5 | 15 |
(2)为尽量减小杠杆自身的______对实验结果的影响,应使杠杆在水平位置平衡,如图甲中,应将右端的平衡螺母向______(选填“左”或“右”)调节;将杠杆调在水平位置平衡还可以方便的测量______.
(3)实验中测得的数据如表所示,表格中漏填的数据为______N.
(4)有的同学按现有方案得出如下结论:“动力×支点到动力作用点的距离=阻力×支点到阻力作用点的距离”.这个结论与杠杆平衡条件不符,为解决本实验方案的这一不足,小刚同学用弹簧测力计替换了一组钩码,并使测力计的拉力方向______,使杠杆平衡,再做几组实验,即可得到验证.