题目内容
【题目】无人驾驶飞机简称“无人机”,无人机的飞行控制系统简称“飞控”。无人机悬停还是飞行、向哪个方向飞行、上升还是下降等飞行指令都由飞控下达。飞控主要由GPS定位模块、超声波传感器、气压传感器等各种功能的传感器以及控制电路组成。
(1)无人机采用4个电机带动旋翼转动,对下方空气施力,利用______的原理获得升力;
(2)超声波传感器可探测无人机在飞行时遇到的障碍物,这利用了超声波具有______的特点;
(3)气压传感器可通过测定大气压值获知无人机所在位置的______;
(4)某无人机由输出电压15V、容量10000mAh的电池提供飞行能量,该电池最多可提供______![]() 的电能。若这些电能的80%用于飞行,当飞行功率为300W时,最长飞行时间为__________h。
的电能。若这些电能的80%用于飞行,当飞行功率为300W时,最长飞行时间为__________h。
【答案】物体间力的作用是相互的 方向性好 高度 0.15 0.4
【解析】
(1)[1]无人机采用4个电机带动旋翼转动,对下方空气施力,利用物体间力的作用是相互的原理获得升力。
(2)[2]超声波传感器可探测无人机在飞行时遇到的障碍物,这利用了超声波具有方向性好的特点。
(3)[3]因大气压强随高度的增大而减小,故气压传感器可通过测定大气压值获知无人机所在位置的高度。
(4)[4]由![]() 可得该电池最多可提供的电能
可得该电池最多可提供的电能
![]()
[5]由题意可知
![]()
则飞行时间为
![]()

 黄冈小状元解决问题天天练系列答案
黄冈小状元解决问题天天练系列答案 三点一测快乐周计划系列答案
三点一测快乐周计划系列答案

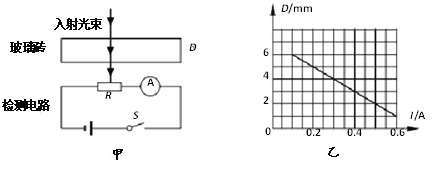
【题目】在探究光的折射规律的实验中,小华和小明发现不同玻璃的“透光度”是不同的,于是他们决定深入探究光透过玻璃砖后的光照强度与哪些因素有关?
为此小华提出如下猜想:
猜想 1:与玻璃的颜色有关
猜想 2:与光在玻璃中通过的路程有关
猜想 3:与光折射出玻璃时的角度有关
(1)根据所学的物理知识可确定猜想1是______的,理由是______;
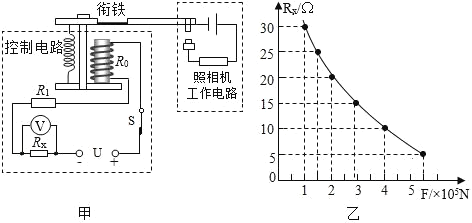
检测电路中电源电压恒为 9V,光敏电阻R在不同光照强度下的阻值如下表:
光照强度Fc(lx) | 0.2 | 0.3 | 0.6 | 0.8 | 1.0 | 1.2 |
电阻R(Ω) | 90 | 60 | 30 | 22.5 | 18 | 15 |
实验过程中确保将光照强度恒定的入射光束垂直入射平板玻璃砖,多次更换不同厚度的玻璃砖,读出对应的电流值,作出玻璃砖厚度D与电流I的图像如图乙所示;
①实验中,当光照强度为 0.4lx的折射光照射在光敏电阻R上时,电流表示数为______A,此时所用玻璃砖的厚度![]() ______mm;
______mm;
②由实验数据分析可知光照强度 Fc 与厚度D的数据关系式为:![]() ______;
______;
(3)为了探究猜想3,小华在将光照强度恒定的入射光多次改变入射角斜射穿过同一厚度的平板玻璃砖,发现入射角不同电流表的示数也不同,由此他认为猜想3正确。请你
①小明发现小华的探究过程中存在的不足是:______;
②小明经过思考后认为:只要把图甲所示的方案中的“平板玻璃砖”替换成______(选填“三棱镜”或“半圆形玻璃砖”)就可以弥补了小华的探究过程中存在的不足。


【题目】在平静的室内水池旁边,小明用一支激光笔把光斜射向水面,光束与水面夹角为35°,发现同时照亮了池底的A点和墙上的B点。其光路的侧视图如图所示:
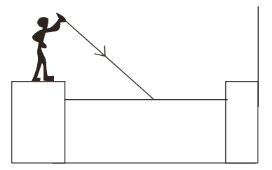
(1)请在图中补充光路图,画出A点大致位置和墙上的B点所在位置;
(________)
(2)反射角为______(填写具体度数)
表:该激光从空气射向水中,入射角与折射角的大小关系;
入射角 | 10° | 20° | 30° | 40 | 50° | 60° | 70 | 80 | 90° |
折射角 | 7.5° | 14.9° | 22.0° | 28.8° | 35.1° | 40.5° | 44.8° | 47.6° | 48.6° |
(3)小明查得光从空气射向水中,入射角与折射角的大小关系如上表,则小明这一次照射的折射角最接近下列中的________(选填以下对应的字母)
A.25° B.38° C.43.1°