题目内容
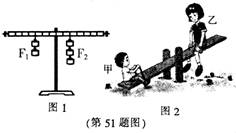
同学们利用图1装置验证“杠杆的平衡条件”,实验中记录的数据如下:

(1)写出分析处理实验数据的具体过程及验证的结果.
(2)杠杆在生活中有很多应用.如图2所示,现欲使静止的跷跷板发生转动,可采取的做法是 ,并说出能驱使跷跷板发生转动的条件 .
(5分)
(1)过程:分别计算出动力×动力臂(或F1·L1)分别计算出阻力×阻力臂(或F2·L2)
第一组 1N×15cm ="15N·cm " l5N × l0cm=15N·cm
第二组 2N×25cm="50N·cm " 25N × 20cm="50N·cm"
第三组 3N×20cm="60N·cm" 4N × 15cm=60N·cm
经过比较每一组的动力和动力臂乘积与阻力和阻力臂乘积都相等(1分)
验证的结果:经验证可得出杠杆平衡时满足:动力×动力臂=阻力×阻力臂(1分)(或F1L1=F2L2)
(2)做法:甲不动,乙向远离支点方向移动(1分)
(或乙不动,甲向靠近支点方向移动)
(或乙不动,甲蹬地,减小甲对跷跷板的压力)
条件:使跷跷板顺时针和逆时针方向转动的力和力臂的乘积不相等(1分)(或动力×动力臂≠阻力×阻力臂)(或F1L1≠F2L2)解析:
略
(1)过程:分别计算出动力×动力臂(或F1·L1)分别计算出阻力×阻力臂(或F2·L2)
第一组 1N×15cm ="15N·cm " l5N × l0cm=15N·cm
第二组 2N×25cm="50N·cm " 25N × 20cm="50N·cm"
第三组 3N×20cm="60N·cm" 4N × 15cm=60N·cm
经过比较每一组的动力和动力臂乘积与阻力和阻力臂乘积都相等(1分)
验证的结果:经验证可得出杠杆平衡时满足:动力×动力臂=阻力×阻力臂(1分)(或F1L1=F2L2)
(2)做法:甲不动,乙向远离支点方向移动(1分)
(或乙不动,甲向靠近支点方向移动)
(或乙不动,甲蹬地,减小甲对跷跷板的压力)
条件:使跷跷板顺时针和逆时针方向转动的力和力臂的乘积不相等(1分)(或动力×动力臂≠阻力×阻力臂)(或F1L1≠F2L2)解析:
略

练习册系列答案
相关题目
 26、同学们利用图1装置验证“杠杆的平衡条件”,实验中记录的数据如下:
26、同学们利用图1装置验证“杠杆的平衡条件”,实验中记录的数据如下: