题目内容
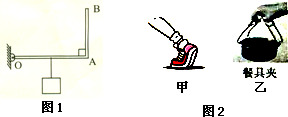
(1)如图1所示,重力不计的杠杆OAB,可绕O点在竖直平面内转动.重力为100N的物体挂在OA的中点处.已知OA=40cm,AB=30cm,OA垂直于AB,杠杆与转动轴间的摩擦忽略不计.要使杠杆平衡,且OA段处于水平位置,那么作用于B端的最小力的大小等于
(2)如图2所示,甲图人在一般情况下步行前进时,若鞋底与地面没有打滑,地面对鞋底的摩擦力方向是向
40
40
N.(2)如图2所示,甲图人在一般情况下步行前进时,若鞋底与地面没有打滑,地面对鞋底的摩擦力方向是向
前
前
(填“前”或“后”);乙图中的餐具夹是费力
费力
杠杆.分析:(1)由杠杆的平衡条件:F1L1=F2L2,可知:在阻力与阻力臂一定的情况下,动力臂越长动力小,根据题意确定找出最大的动力臂,然后由杠杆平衡条件,求出最小的动力.
(2)静摩擦力的方向与物体运动趋势方向相反,先判断鞋底相对于地面运动趋势的方向,然后再判断摩擦力的方向;
杠杆分三类:动力臂大于阻力臂的是省力杠杆,动力臂小于阻力臂的是费力杠杆,动力臂等于阻力臂的是等臂杠杆,根据动力臂与阻力臂的关系确定.
(2)静摩擦力的方向与物体运动趋势方向相反,先判断鞋底相对于地面运动趋势的方向,然后再判断摩擦力的方向;
杠杆分三类:动力臂大于阻力臂的是省力杠杆,动力臂小于阻力臂的是费力杠杆,动力臂等于阻力臂的是等臂杠杆,根据动力臂与阻力臂的关系确定.
解答:解:(1)由题意及图示可知,当力臂为OB时,力臂最长,此时最省力;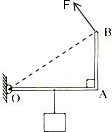
连接OB,力F垂直于OB时,力臂最大,作用力最小,如图所示;
由勾股定理可得OB=
=
=50cm,
由杠杆平衡条件得:G×LG=F×LF,即:G×
OA=F×OB,
F=
=
=40N;
(2)人走路时,若鞋底与地面没有打滑,鞋底相对地面的运动趋势方向向后,
所以地面给鞋底的摩擦力方向向前的;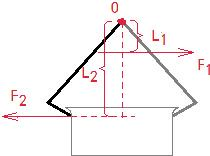 餐具夹的示意图如右图所示:
餐具夹的示意图如右图所示:
以夹子的一面分析,F1为手对夹子施加的动力,F2为餐具对夹子施加的阻力,由图可知动力臂小于阻力臂,所以餐具夹是费力杠杆.
故答案为:(1)40;(2)前;费力.
连接OB,力F垂直于OB时,力臂最大,作用力最小,如图所示;
由勾股定理可得OB=
| (0A)2+(AB)2 |
| (40cm)2+(30cm)2 |
由杠杆平衡条件得:G×LG=F×LF,即:G×
| 1 |
| 2 |
F=
G×
| ||
| OB |
100N×
| ||
| 50cm |
(2)人走路时,若鞋底与地面没有打滑,鞋底相对地面的运动趋势方向向后,
所以地面给鞋底的摩擦力方向向前的;
餐具夹的示意图如右图所示:以夹子的一面分析,F1为手对夹子施加的动力,F2为餐具对夹子施加的阻力,由图可知动力臂小于阻力臂,所以餐具夹是费力杠杆.
故答案为:(1)40;(2)前;费力.
点评:(1)此题主要考查了对杠杆平衡条件的应用,同时还考查了杠杆最小力的问题,解决此类问题,关键是找到最长的力臂.
(2)本题易错点在摩擦力方向的判断上,摩擦力的方向与物体相对运动方向或相对运动趋势方向相反,摩擦力方向与物体运动方向无关,要判断摩擦力的方向应先判断出物体间的相对运动方向或相对运动趋势方向.要根据动力臂与阻力臂的关系确定杠杆的类型.
(2)本题易错点在摩擦力方向的判断上,摩擦力的方向与物体相对运动方向或相对运动趋势方向相反,摩擦力方向与物体运动方向无关,要判断摩擦力的方向应先判断出物体间的相对运动方向或相对运动趋势方向.要根据动力臂与阻力臂的关系确定杠杆的类型.

练习册系列答案
相关题目




 按要求作图:
按要求作图: