��Ŀ����
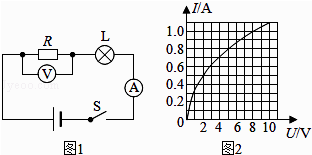
����Ŀ����ͼ����ʾ��ijʵ��С���ڡ�����С���ݵĵ��衱ʵ������Ƶĵ�·ͼ������С���ݱ��С�2.5V�������� 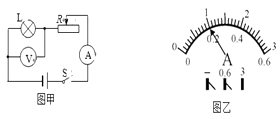
��1����ʵ���ԭ���� ��
��2������ͬѧ���Ӻõ�·�����һ������ʱ��С�������̷������Ĺ�����������������IJ��淶������ ��
��3����ʼʵ���ͬѧ�������������ƶ���ƬP���Ƶ����ȶ��������仯������һֱ�ܰ������������
��4����ij�β���ʱ��ѹ����ʾ��Ϊ2V����������ʾ����ͼ����ʾ�����������ʾ��ΪA����ʱ���ݵĵ���Ϊ���������������·��С��������������С�������˵�ѹΪ2.5����ʱ�ĵ��裬��ƬӦ����ѡ����ҡ����ƶ���
��5������ͬѧ�ֱ��¼�����ѹ�͵���ֵ��ͨ�����㷢�ֵ�˿�����Dz�ͬ�ģ����ǻ��˽������ͬѧҲ�õ����ƵĽ�����������ֽ����ԭ���� ��
���𰸡�
��1��R= ![]()
��2������δ�Ͽ�
��3�����߽��ڻ����������¶˵Ľ�������
��4��0.2��10����
��5����˿�����С���¶��й�
���������⣺��1����ʵ���ԭ���ǣ�R= ![]() ����2�����������һ�����ߣ��������������Ĺ�����˵�����ӵ�·ʱ�����ش��ڱպ�״̬��δ�Ͽ�������3������Ŀ�е������������ƶ���ƬP���Ƶ����ȶ��������仯��˵������������ʧȥ�˱�����������ݵ��ݺܰ���֪����ʱ�����������·�ĵ���ܴʿ��жϹ����ǻ������������ӵ���������������������4����ѹ��ʹ�õ�0��0.3A���̣�ÿһ��������1A��ÿһ��С�����0.02A������Ϊ0.2A��
����2�����������һ�����ߣ��������������Ĺ�����˵�����ӵ�·ʱ�����ش��ڱպ�״̬��δ�Ͽ�������3������Ŀ�е������������ƶ���ƬP���Ƶ����ȶ��������仯��˵������������ʧȥ�˱�����������ݵ��ݺܰ���֪����ʱ�����������·�ĵ���ܴʿ��жϹ����ǻ������������ӵ���������������������4����ѹ��ʹ�õ�0��0.3A���̣�ÿһ��������1A��ÿһ��С�����0.02A������Ϊ0.2A��
��ʱ���ݵĵ��裺R= ![]() =
= ![]() =10����С��������������С�������˵�ѹΪ2.5����ʱ�ĵ��裬ʹ���ݵ�ѹ��2V����2.5V�������·��������С�ܵ��裬��С���������������·�ĵ��裬���������������Σ����Ի�Ƭ���ƣ���5��ʵ������У���˿�ij��ȡ������������ϣ���ѹ��ͬ��������ͬ����˿�¶Ȳ�ͬ�����費ͬ�����Ե�˿�����С���¶��йأ�
=10����С��������������С�������˵�ѹΪ2.5����ʱ�ĵ��裬ʹ���ݵ�ѹ��2V����2.5V�������·��������С�ܵ��裬��С���������������·�ĵ��裬���������������Σ����Ի�Ƭ���ƣ���5��ʵ������У���˿�ij��ȡ������������ϣ���ѹ��ͬ��������ͬ����˿�¶Ȳ�ͬ�����費ͬ�����Ե�˿�����С���¶��йأ�
���Դ��ǣ���1��R= ![]() ����2�����ӵ�·ʱ������δ�Ͽ�����3���������������ӵ���������������������4��0.2��10����5����˿�����С���¶��йأ�
����2�����ӵ�·ʱ������δ�Ͽ�����3���������������ӵ���������������������4��0.2��10����5����˿�����С���¶��йأ�



����Ŀ���Ķ����ģ��ش����⣺
ɨ�ػ�����
ɨ�ػ�������һ�����Զ���ɨ�����ܼ��õ�������ͼ�ף�
������ͨ���綯����ת�����������������ҳ����������뼯���У��������Ƥ�����������Ƴɣ��ײ���װ������ˢ��������ɨ�����ڵذ��ϵĻҳ�����С���壻ǰ��װ�и�Ӧ����ͨ�����䡢���ճ������������������ϰ����ʣ�������Ϊ���������20%ʱ�������˻�����Ѱ�ҳ������磮��һΪijɨ�ػ����˵IJ��ֲ������������ָ�ŵ������ŵ���ʱ��ij˻���
��һ��
�������ѹ | 12V | ����� | 30W |
������� | 2500mAh | �������� | ��50dB |
��������������������빦���Ǻ��������ӵ���Ҫ���������ij������������빦������նȡ�������Ķ�Ӧ��ϵ���������ն�ָ�����ڲ���ѹ��������ѹ�����ָ��λʱ����ͨ����������ų��Ŀ������������������빦�������빦�ʵı�ֵ����Ч�ʣ�
������
��նȣ�Pa�� | 400 | 450 | 500 | 550 | 600 |
������m3/s�� | 0.025 | 0.02 | 0.017 | 0.015 | 0.013 |
���빦�ʣ�W�� | 10.00 | 9.00 | 8.50 | 7.80 |
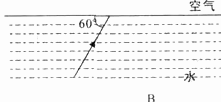
��1�������˹���ʱ�������ڲ�����ѹ ��ѡ����ڡ�����С�ڡ����ڡ�������ѹ���������������û��������ϰ��ﴹֱ���䳬����������0.001s�յ��ز������䷢�䳬����ʱ���ϰ����ľ���ԼΪ cm�����賬�����ڿ����еĴ����ٶ�Ϊ340m/s��
��2������˵���д������
A.�����о���ʱ����С����������ڵذ��϶�������ɨ
B.���������ʵ���Ƥ��������������������Ħ��
C.�����˹���ʱ����������������˵������������
D.�����������ŵ����ϰ���ʱ��ʹ�ú����߸�Ӧ��Ч���Ϻ�
��3���û�������������ʱ�ĵ���Ϊ A�������������һ���Զ����ǰ�ܹ����������������ʱ��Ϊ min
��4���ɱ������ݿ�֪��������Ϊ0.015m3/sʱ����������������빦��Ϊ25W����ʱ��Ч��Ϊ %�����������£�10min��ͨ�������������Ŀ�������Ϊ kg����ȡ������=1.3kg/m3��
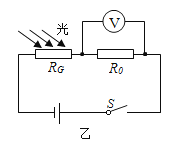
��5�����������������ҳ��������ij���Ԫ����ͼ��Ϊij��������Ŀ��Ƶ�·����Դ��ѹU0�㶨��RGΪ�������裬����ֵ�������̶ȵı仯���仯��R0Ϊ��ֵ���裮����������ֱ�Ϊ6����18��ʱ����ѹ����ʾ���ֱ�Ϊ6V��3V����R0= ����Ϊ����������̶ȣ��ֽ���ѹ�����̵���ؿ̶�ֵת��Ϊ��Ӧ������ֵ��R0+RG������ת��������ϴ������������̶��߶�Ӧ��ֵ�ļ�С���� ��ѡ����������䡱��С����