题目内容
【题目】小明在“研究杠杆平衡条件”的实验中所用的实验器材有:刻度均匀的杠杆、支架、弹簧测力计、刻度尺、细线和质量相同的50g的钩码若干个(g取10N/kg)。
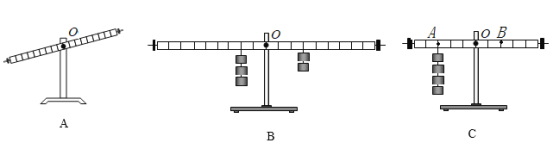
(1)杠杆停在如图A所示位置时,_____(选填“属于”或“不属于”)平衡状态。为使杠杆在水平位置平衡,小明应将杠杆两端的平衡螺母向_____(选填“左”或“右”)移。
(2)小明用图B的方案进行探究,若在左侧钩码的下方再挂一个钩码,则右侧所挂钩码须向右移动_____格,可使杠杆在水平位置再次平衡。
(3)同组的小华取下右侧钩码,在A处挂4个钩码,在B处用弹簧测力计向下拉(如图C所示,图中测力计没有画出),则测力计示数至少为_____N时,杠杆可在水平位置平衡。
(4)有下列三个实验,实验_____中进行多次测量的目的与“探究杠杆平衡的条件”多次测量目的相同(选填序号)。
①探究光的反射规律 ②用刻度尺测物体长度 ③测量定值电阻的阻值
【答案】属于 右 1 3 ①
【解析】
(1)[1]杠杆停在如图A所示位置,杠杆静止,属于平衡状态。
[2]调节杠杆平衡时,平衡螺母应向杠杆上翘的一端移动,即小明应将杠杆两端的平衡螺母向右移。
(2)[3]设一个钩码的重力为G,杠杆上一格的长度为L,由杠杆的平衡条件可得
![]()
解得
![]()
所以右侧所挂钩码须向右移动1格。
(3)[4]竖直向下拉时,力臂最长,力最小,一个钩码的重力为
![]()
设杠杆上一格的长度为L,由杠杆的平衡条件可得
![]()
解得
![]()
即测力计示数至少为3N时,杠杆可在水平位置平衡。
(4)[5]“探究杠杆平衡的条件”多次测量的目的是为得到普遍规律,实验①多次测量的目的也是为得到普遍规律,实验②③中多次测量的目的是为求平均值,减小误差,所以实验①中进行多次测量的目的与“探究杠杆平衡的条件”多次测量目的相同。

 天天向上一本好卷系列答案
天天向上一本好卷系列答案 小学生10分钟应用题系列答案
小学生10分钟应用题系列答案






【题目】阅读短文,回答问题。
近年来,多旋翼无人机发展迅速。由于其机动性和灵活性强,广泛应用在航拍领域、交通管理等方面,在新冠疫情防控期间发挥了巨大作用。如图所示为某品牌四旋翼无人机,它采用4个电机带动旋翼(螺旋桨)转动,对下方空气施力的同时获得升力。该无人机设有一键起降和返航、空中悬停等功能,携带的摄像机可以进行高清拍摄并实时把信号传到遥控器显示器,它还拥有GPS卫星定位系统。下表是该无人机的部分参数:
无人机型号 | DJ-精灵 4 | 电源额定电压 | 15V |
最大起飞海拔高度 | 5000m | 电池容量 | 5000mA·h |
最大上升速度 | 6m/s | 电动机工作电压 | 12V |
最大下降速度 | 2m/s | 悬停时每个电动机功率 | 50W |
最大水平速度 | 16m/s | 电动机数量 | 4 |
停放地面总接触面积 | 20cm2 | 整机质量 | 2kg |

(1)螺旋桨转动,向下推动空气,使得直升飞机获得向上的升力,说明______;
(2)根据上述内容,下列说法中正确的是______;
A.无人机悬停在空中时受非平衡力
B.无人机在悬停时不消耗电能
C.遥控无人机、卫星定位都是通过超声波来传递信息的
D.无人机在拍摄地面图像时减小悬停高度可以使图像变大
(3)电动机在工作时要保持其两端电压为 12V 不变,通过电子调速器(简称电调)来控制电动机的电流从而改变电动机的功率,每一个电动机连接一个电调,那么电动机和电调的连接方式是_____(并联/串联);若电源电压全部加在电动机和电调的两端,则电动机和电调的功率之比为______。