题目内容
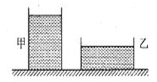
【题目】如图所示,在水平桌面上放置甲、乙两圆柱形容器(自重忽略不计),内装有质量相同的水。则容器对桌面的压力的大小关系是F甲________F乙;水对甲、乙两容器底的压强的大小关系是 p甲________p乙。(均选填“大于”、“小于”或“等于”)
【答案】等于 大于
【解析】
[1]甲、乙两圆柱形容器放置在在水平桌面上,对地面的压力等于物体的重力,即
![]() ,
,![]()
甲、乙两圆柱形容器(自重忽略不计),内装有质量相同的水,则
![]()
则
![]()
即容器对桌面的压力的大小关系是F甲等于F乙。
[2]水对甲、乙两容器底的压强,只与液体深度和液体密度有关,甲、乙两容器中均装入的水,即液体密度相同即
![]()
而甲容器中水较乙容器深即
![]()
由![]() 可知
可知
![]()
水对甲、乙两容器底的压强的大小关系是p甲大于p乙。


【题目】阅读短文,回答问题,
近年来,多旋翼无人机发展迅速,如图所示为某品牌四旋翼无人机,它采用4个电机带动旋翼(螺旋桨)转动,对下方空气施力的同时获得升力。该无人机设有一键起降和返航、空中悬停等功能,携带的摄像机可以进行高清拍摄并实时把信号传到遥控器显示器,它还拥有GPS卫星定位系统。下表是该无人机的部分参数:
整机质量 | 2kg | 锂电池额定电压 | 15V |
最大上升速度 | 6m/s | 锂电池容量 | 5000mAh |
最大下降速度 | 2m/s | 电动机工作电压 | 12V |
最大水平速度 | 16m/s | 悬停时每个电动机功率 | 50W |
最大速度上升时受到的阻力 | 10N | 电动机的能量转化效率(电能转机械能) | 90% |
(1)根据上述内容,下列关于无人机说法中不正确的是_________;
A.它的遥控、卫星定位都是通过电磁波来传递信息的B.它悬停时也消耗电能
C.它在拍摄图像时减小悬停高度可以使图像变大D.它的电机工作原理是电磁感应
(2)电动机在工作时要保持其两端电压为12V不变,通过电子调速器(简称电调)来控制电动机的电流从而改变电动机的功率,每一个电动机连接一个电调,那么电动机和电调的连接方式是_________(选填“并联”或“串联”);
(3)在电池满容量的情况下,该无人机参与某次火情的勘测时,需要从地面起飞,飞到火场上空60米高处,然后悬停观测(整个过程四个电动机同时工作),这一过程可视为以最大速度匀速直线上升,且达到60米高处时立即静止(悬停)。若无人机悬停观测15分钟,则从起飞到悬停结束,电动机消耗的电能是_________(g取10N/kg);
E/cd | 1.0 | 2.0 | 3.0 | 4.0 | 6.0 |
Rp/Ω | 18 | 9 | 6 | 4.5 | 3 |
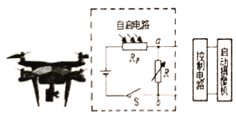
(4)小明利用红外探测器设计了一个“模拟自启系统”,如图所示:该系统由“自启电路”、“控制电路”等组成,其中电源由“无人机”的锂电池提供,R是电阻箱,Rp是红外探测器,可视为可变电阻,它的阻值与红外线强度变化的对应关系如上表所示、(E为红外线强度,cd表示其单位)若a、b两端电压必须等于或大于10V时,控制电路才能启动摄像机进入工作状态。小明设定红外线强度为4.5cd时启动摄像机,电阻箱的阻值至少应调到________Ω;
(5)为了能使控制电路在红外线强度再稍强时才能启动摄像机进入工作状态,可采取的措施:_________(写一条合理措施)。

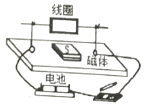
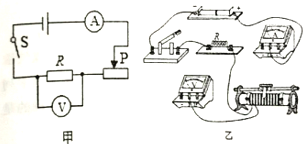
【题目】小明利用如图甲所示的实验电路探究“电流与电阻的关系”,可供选择的器材有:电源(两节新干电池),电流表、电压表、开关,阻值分别为5Ω、10Ω、25Ω的定值电阻各一个,“10Ω 2A”“20Ω 1.5A”两种规格的滑动变阻器,导线若干。
实验组别 | 一 | 二 | 三 |
电阻R/Ω | 5 | 10 | 25 |
电流/A | 0.4 | 0.2 | 0.08 |
(1)请你用笔画线代替导线,根据甲图,将图乙中的实物图连接完整。
(______)
(2)闭合开关前,应将滑片移到_____端(选填“左”或“右”)。连接无误后,闭合开关,发现电流表无示数,电压表指针有明显偏转,原因可能是_____。
(3)故障排除后,依次将阻值为5Ω、10Ω、25Ω的定值电阻接入电路中,获得的数据如上表。实验中、完成第一组实验后,断开开关,拆下5Ω的电阻,改接10Ω的电阻,继续操作时有以下四步:①闭合开关;②将滑动变阻器的滑片移到阻值最大位置;③记录电流表示数;④将滑动变阻器的滑片移到适当位置。从安全和规范角度考虑,正确的顺序是_____。
(4)上述操作④中如何判断滑片已处于适当位置:_____;本次实验中选择较合适的滑动变阻器的规格为_____:
(5)测量结束后,应断开开关,先拆除_____两端的导线,再拆除其他导线,整理器材。


