题目内容
【题目】中国已成为机器人与智能装备产业全球最大应用市场,在第二届中国(重庆)国际机器人及智能制造装备论坛暨博览会上,如图所示是送餐机器人工作时在水平地面上匀速前行.下列说法正确的是( ) 
A.餐盘相对于机器人是运动的
B.餐盘中食品受到平衡力作用
C.机器人在水平地面匀速前行过程中机械能增大
D.机器人在水平地面匀速前行时不受摩擦力的作用
【答案】B
【解析】解:A、餐盘相对于机器人来说,其相对位置没有改变,所以处于相对静止状态,故A错误; B、由于餐盘处于匀速直线的运动状态,所以是平衡状态,即所受的力是平衡力,故B正确;
C、机器人在水平地面匀速前行过程中质量不变,速度不变,动能不变,高度不变,重力势能也不变,所以机械能不变,故C错误;
D、送餐机器人工作时在水平地面上匀速前行,与地面接触,且有一个运动的趋势,所以会受到摩擦力,故D错误;
故选B.
(1)世界上的一切物体都是运动的,绝对静止的物体是不存在的,我们所说的静止是相对的,是相对于参照物而言的;(2)物体处于平衡状态时,所受的力是平衡力;(3)动能的大小与物体的质量、速度有关;重力势能的大小与物体的质量、高度有关,动能和势能统称为机械能;(4)摩擦力的产生条件是:两个物体相互接触,有一个相对运动的趋势;






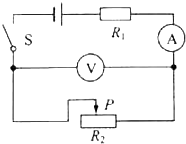
【题目】图甲是在物理实验室测量小灯泡额定功率的实验装置,小灯泡上标有2.5V的字样,采用两节新的干电池做电源.
实验次数 | 1 | 2 | 3 |
U/v | 2.0 | 2.5 | 2.8 |
I/A | 0.30 | 0.38 |

(1)为保护电路元件安全,连接电路时开关应;图中有一根导线还没有连好,应该把它接在电压表(选填“0”、“3”或“15”)接线柱上.
(2)闭合开关前,滑动变阻器的滑片P应调至(选填“C”或“D”)端;闭合开关后,电压表示数为2V,为测量灯泡的额定功率,应将滑动变阻器的滑片P向(选填“C”或“D”)端滑动,直到电压表示数为2.5V时为止.
(3)当小灯泡正常发光时,电流表示数如图乙所示,小灯泡的额定功率为 .
(4)利用所测数据也能计算出灯泡正常发光时灯丝的电阻为(保留到整数位).
(5)他通过调节滑动变阻器的滑片,测出了三组实验数据,如表所示.经过计算发现小灯泡亮度不同时,不但电功率不同,而且电阻也不同,你认为造成电阻不同的原因是 .



