题目内容
按题目要求作图
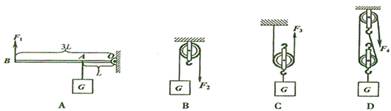
(1) 某剧组为拍摄需要,设计了如图所示的装置来改变照明灯的高度.轻质杠杆ABO可绕
O点转动,在图中画出ABO所受阻力F2的示意图,并画出动力臂l1和阻力臂l2.
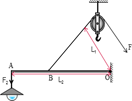
(2) 在图中,O为支点,画出使杠杆保持平衡的最小力F(保留作图痕迹)
(3) 如图画出使用滑轮组最省力的绕法。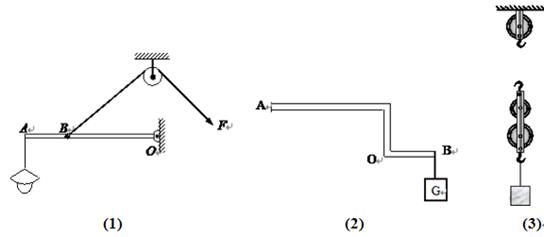
(1) 某剧组为拍摄需要,设计了如图所示的装置来改变照明灯的高度.轻质杠杆ABO可绕
O点转动,在图中画出ABO所受阻力F2的示意图,并画出动力臂l1和阻力臂l2.
(2) 在图中,O为支点,画出使杠杆保持平衡的最小力F(保留作图痕迹)
(3) 如图画出使用滑轮组最省力的绕法。
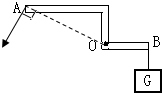

图中支点为O点,阻力F2的方向与杠杆OB垂直,动力臂是支点到动力作用线的垂线段,阻力臂是支点到阻力作用线的垂线段,如图所示:
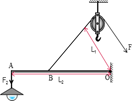
力臂越长越省力,故连接OA,过A点做垂直于OA斜向上的力,即为最小的力,如下图所示:
对由两个动滑轮和一个定滑轮组成的滑轮组:一是绳子先系在定滑轮的固定挂钩上,这种绕法滑轮组上的滑轮都使用,有四股绳子承担物重;拉力是滑轮组提升物重的四分之一,
二是绳子先系在动滑轮的固定挂钩上,最后滑轮组只能使用一个动滑轮和一个定滑轮,有一个动滑轮后没有使用,这种绕法只能有三股绳子承担物重,拉力是滑轮组提升物重的三分之一,根据题意滑轮组最省力的绕法是绳子股数最多是第一种,即四股绕线的方法.

力臂越长越省力,故连接OA,过A点做垂直于OA斜向上的力,即为最小的力,如下图所示:
对由两个动滑轮和一个定滑轮组成的滑轮组:一是绳子先系在定滑轮的固定挂钩上,这种绕法滑轮组上的滑轮都使用,有四股绳子承担物重;拉力是滑轮组提升物重的四分之一,
二是绳子先系在动滑轮的固定挂钩上,最后滑轮组只能使用一个动滑轮和一个定滑轮,有一个动滑轮后没有使用,这种绕法只能有三股绳子承担物重,拉力是滑轮组提升物重的三分之一,根据题意滑轮组最省力的绕法是绳子股数最多是第一种,即四股绕线的方法.

练习册系列答案
 小学学习好帮手系列答案
小学学习好帮手系列答案 小学同步三练核心密卷系列答案
小学同步三练核心密卷系列答案
相关题目