题目内容
 甲、乙两位同学在“研究杠杆平衡条件”实验中:
甲、乙两位同学在“研究杠杆平衡条件”实验中:
(1)实验前出现如图甲情况,为使杠杆在水平位置平衡,应将杠杆左端的螺母向________调(填“左”或“右”).实验中调节杠杆在水平位置平衡是为了________.
(2)实验过程中按图乙挂置钩码,则杠杆________(选填“能”、“不能”)在水平位置平衡;
为了使杠杆住水平位置平衡,这时应将右边的钩码向________(填“左”或“右”)移动________格.
(3)甲乙两同学分别得到下面两组数据和结论.
| 甲同学 | ||||
| 次数 | 动力 | 动力臂 | 阻力 | 阻力臂 |
| 1 | 4 | 5 | 5 | 4 |
| 结论 | 动力+动力臂=阻力+阻力臂 | |||
| 乙同学 | |||
| 动力 | 动力臂 | 阻力 | 阻力臂 |
| 7 | 4 | 2 | 14 |
| 6 | 4 | 8 | 3 |
| 4 | 5 | 2 | 10 |
| 动力×动力臂=阻力×阻力臂 | |||
解:(1)由图甲知,杠杆向左倾斜,所以应将平衡螺母向右移动.
实验中要使杠杆在水平位置平衡,这样做的目的是便于测量力臂.
(2)设每个钩码的重力为G,每个小格的长度为l.
则左端=2G×3L=6GL 右端=G×4L=4GL
6GL>4GL,所以杠杆将向左端倾斜,为使杠杆平衡,右端钩码需向右移动2个小格.
(3)甲组只通过两组特殊的数据,即动力和动力臂与阻力和阻力臂都是4、5就得出结论,过于片面;实验应该至少在三次以上,且数据不要是几个特殊的数字,这样才能分析确定出实验现象中的普遍规律.
而且甲组是:动力+动力臂=阻力+阻力臂,类似的不同的物理量之间相加,是没有意义的.
故答案为:(1)右;便于测量力臂;(2)不能;右;2格;(3)实验次数太少,具有偶然性; 单位不同的物理量不能直接相加.
分析:(1)杠杆的调节类似生活中的“跷跷板”,满足:左下右调,右下左调,先快后慢.
为了便于测量力臂,要调节杠杆在水平位置平衡.
(2)掌握杠杆的平衡条件:动力×动力臂=阻力×阻力臂.要判断杠杆是否平衡,需要计算出两边力和力臂的乘积,然后进行比较便可得出结论.
根据杠杆平衡条件判断钩码移动的格数.
(3)我们的实验结论必须要具有合理性、科学性,要符合物理规律;同时要多做几次实验,合理分析才能得出正确的结论.
点评:此题是探究杠杆的平衡条件,首先会调节杠杆在水平位置平衡.
同时考查了学生对杠杆平衡条件的掌握和运用,同时考查了学生对实验的分析.
实验中要使杠杆在水平位置平衡,这样做的目的是便于测量力臂.
(2)设每个钩码的重力为G,每个小格的长度为l.
则左端=2G×3L=6GL 右端=G×4L=4GL
6GL>4GL,所以杠杆将向左端倾斜,为使杠杆平衡,右端钩码需向右移动2个小格.
(3)甲组只通过两组特殊的数据,即动力和动力臂与阻力和阻力臂都是4、5就得出结论,过于片面;实验应该至少在三次以上,且数据不要是几个特殊的数字,这样才能分析确定出实验现象中的普遍规律.
而且甲组是:动力+动力臂=阻力+阻力臂,类似的不同的物理量之间相加,是没有意义的.
故答案为:(1)右;便于测量力臂;(2)不能;右;2格;(3)实验次数太少,具有偶然性; 单位不同的物理量不能直接相加.
分析:(1)杠杆的调节类似生活中的“跷跷板”,满足:左下右调,右下左调,先快后慢.
为了便于测量力臂,要调节杠杆在水平位置平衡.
(2)掌握杠杆的平衡条件:动力×动力臂=阻力×阻力臂.要判断杠杆是否平衡,需要计算出两边力和力臂的乘积,然后进行比较便可得出结论.
根据杠杆平衡条件判断钩码移动的格数.
(3)我们的实验结论必须要具有合理性、科学性,要符合物理规律;同时要多做几次实验,合理分析才能得出正确的结论.
点评:此题是探究杠杆的平衡条件,首先会调节杠杆在水平位置平衡.
同时考查了学生对杠杆平衡条件的掌握和运用,同时考查了学生对实验的分析.

练习册系列答案
 阅读快车系列答案
阅读快车系列答案
相关题目
 如图所示,两支相同的试管,内盛等质量的液体.甲管竖直放置,乙管倾斜放置,两管液面相平,比较两管中的液体对管底压强的大小p甲________p乙.
如图所示,两支相同的试管,内盛等质量的液体.甲管竖直放置,乙管倾斜放置,两管液面相平,比较两管中的液体对管底压强的大小p甲________p乙. 微波炉
微波炉 电熨斗
电熨斗 电风扇
电风扇 电暖气
电暖气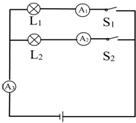 物理兴趣小组的同学连接了如图的电路;原先开关S1、S2是闭合的,现断开S2;那么下列现象中正确的是
物理兴趣小组的同学连接了如图的电路;原先开关S1、S2是闭合的,现断开S2;那么下列现象中正确的是