题目内容
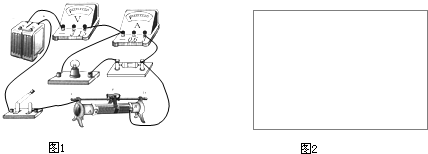
在某次实验中需要测量小灯泡两端的电压和通过它的电流.小明连接了如图1所示的电路,同组的小芳发现有错误,主张拆了,重新连接.可是时间已来不及,聪明的小明眼珠一转,在图1所示的电路中只增加一根导线,电路就正常工作了.
(1)在图1中画出小刚连接的那根导线.
(2)在矩形框内画出小明最后连接好电路的电路图2.
(1)在图1中画出小刚连接的那根导线.
(2)在矩形框内画出小明最后连接好电路的电路图2.
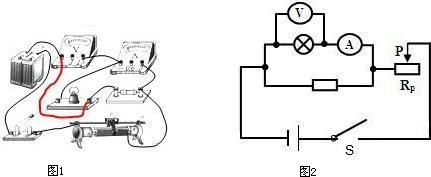
分析:(1)根据实物图可知,电压表的正接线柱与灯泡左端接线柱连接,因此只需将电压表的负接线柱与灯泡的右接线柱相连即可.
(2)连接以后,灯泡与电阻并联,再与滑动变阻器串联,电压表测量灯泡两端的电压,电流表测量通过灯泡的电流,开关控制整个电路.
(2)连接以后,灯泡与电阻并联,再与滑动变阻器串联,电压表测量灯泡两端的电压,电流表测量通过灯泡的电流,开关控制整个电路.
解答:解:(1)将电压表的负接线柱与灯泡的右接线柱相连,如下图所示:
(2)从电源正极开始,依次串联开关、滑动变阻器、电流表、灯泡回到电源负极,再将电阻并联在灯泡和电流表两端,电压表并联在灯泡两端,如下图所示:
(2)从电源正极开始,依次串联开关、滑动变阻器、电流表、灯泡回到电源负极,再将电阻并联在灯泡和电流表两端,电压表并联在灯泡两端,如下图所示:
点评:本题考查实物图的连接,难点是先找出错误的地方,再想办法改正,还考查了电流表和电压表的使用,连接实物图是整个初中阶段物理的难点.

练习册系列答案
 海淀课时新作业金榜卷系列答案
海淀课时新作业金榜卷系列答案 期末金牌卷系列答案
期末金牌卷系列答案 轻松课堂标准练系列答案
轻松课堂标准练系列答案
相关题目
如图1所示,某小组研究“杠杆的平衡条件”,器材:有刻度的杠杆、若干个相同的钩码、弹簧测力计等,O为杠杆的支点.
①实验前,应先调节杠杆在 位置平衡.这样做,除了可以消除自身的重力影响,还可以方便地测量或读出 .调节时,如发现杠杆左端偏高,应如何操作: .

②某实验小组记录两组数据如下:
根据分析,这组数据中,实验序号为 选填:“1”或“2”)的一组肯定有错误.检查发现是测量动力臂时读错了,动力臂的实际值比记录值 (选填:大或小).
③如图2所示,弹簧测力计在C处由竖直向上逐渐向右倾斜拉动杠杆,仍使杠杆在水平位置保持平衡,则弹簧测力计的示数将 (选填:变大、变小或保持不变),其原因是 .
④某次实验中,若采取如图3所示的方式悬挂钩码,杠杆也能在水平位置保持平衡(杠杆上每格等距),但老师却往往提醒大家不要采用这种方式,这主要是以下哪种原因 (选填字母).
A.一个人无法独立操作 B.需要使用太多的钩码
C.力臂与杠杆不重合 D.力和力臂数目过多
⑤如图4所示,实验小组选用长1.6m、粗细均匀的一只金属杆,绕O点在竖直平面内自由转动,同时将一个“拉力--位移传感器”竖直作用在杆上,并使杠杆在水平位置始终保持平衡.该传感器显示其拉力F与作用点到O点距离x的变化关系如图所示.由图5可知金属杆重 N.
①实验前,应先调节杠杆在
②某实验小组记录两组数据如下:
| 实验序号 | 动力F1/N | 动力臂L1/cm | 阻力F2/N | 阻力臂L2/cm |
| 1 | 2 | 20 | 1 | 10 |
| 2 | 1 | 8 | 2 | 4 |
③如图2所示,弹簧测力计在C处由竖直向上逐渐向右倾斜拉动杠杆,仍使杠杆在水平位置保持平衡,则弹簧测力计的示数将
④某次实验中,若采取如图3所示的方式悬挂钩码,杠杆也能在水平位置保持平衡(杠杆上每格等距),但老师却往往提醒大家不要采用这种方式,这主要是以下哪种原因
A.一个人无法独立操作 B.需要使用太多的钩码
C.力臂与杠杆不重合 D.力和力臂数目过多
⑤如图4所示,实验小组选用长1.6m、粗细均匀的一只金属杆,绕O点在竖直平面内自由转动,同时将一个“拉力--位移传感器”竖直作用在杆上,并使杠杆在水平位置始终保持平衡.该传感器显示其拉力F与作用点到O点距离x的变化关系如图所示.由图5可知金属杆重



