题目内容
按照题目要求作图
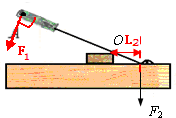
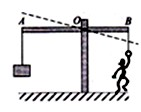
(1)图甲所示,用螺丝刀撬起图钉.请在图上画出螺丝刀受到图钉阻力F2的力臂;并画出作用在螺丝刀柄上A点的最小动力F1的示意图.
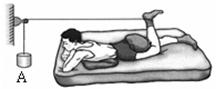
(2)图乙中,站在地面上的小刚借助滑轮组匀速提升重物,请画出最省力的绕线方法.
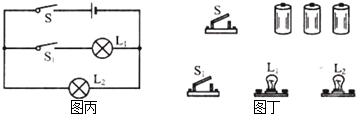
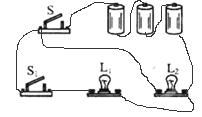
(3)请按如图丙所示的电路图,连接实物图丁.
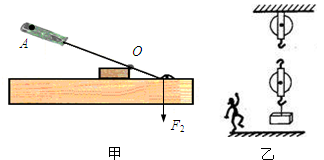
(1)图甲所示,用螺丝刀撬起图钉.请在图上画出螺丝刀受到图钉阻力F2的力臂;并画出作用在螺丝刀柄上A点的最小动力F1的示意图.
(2)图乙中,站在地面上的小刚借助滑轮组匀速提升重物,请画出最省力的绕线方法.
(3)请按如图丙所示的电路图,连接实物图丁.
(1)
(2)

(3)
(2)
(3)
试题分析:(1)画力臂应从支点向力的作用线画垂线,阻力F2的力臂如图中L2所示.画最小的动力则要找到最长的力臂,当支点到力的作用点这一段距离恰好为力臂时,力最小,因此作用在A点的最小动力应过A点垂直于OA斜向下,为图中的力F1,它与杠杆垂直,此时的动力臂为OA.(2)在使用滑轮组提升重物时,既要考虑到它的省力情况,还应注意动力的施力方向.对由一个动滑轮和一个定滑轮组成的滑轮组,可绕线方法有两股和三股两种,两种方法都达到了省力的目的,但拉力的方向不同,有三股绕线的方法拉力方向向上;有两股绕线的方法拉力方向向下,根据题意小刚站在地面上可知拉力方向向下,因此从定滑轮上固定,如图所示.(3)根据电路图连接实物图时,可以根据电流流向法进行连接,先从电源的正极出发依次串联电路元件最多的支路,再把并联的另一部分接到到相应的位置即可.如图,先将三节电池的正负极首尾连接组成电池组,再从正极出发依次串联开关S、开关S1、、灯泡L1回到负极,把灯泡L2的左端与开关S1的左端相连、灯泡L2的右端和灯泡L1的右端相连即可.

练习册系列答案
相关题目




 瓶起子
瓶起子 镊子
镊子 钢丝钳子
钢丝钳子 剪纸剪刀
剪纸剪刀