题目内容
【题目】如图所示是最新设计的无人机,配备一个摄像头,远程计算机通过这个摄像头可以控制它的飞行,使它能够在适合的地方着陆。下列说法中错误的是

A. 当飞机受平衡力的时候是处于静止状态或匀速直线运动状态
B. 电子马达相当于一个电动机,它把电能转换成动能
C. 当机翼产生的升力大于飞机受到的重力时,无人机就能升空
D. 无人机在匀速上升过程中动能和势能都增加
【答案】D
【解析】
A.物体不受力或受平衡力时,总保持静止状态或匀速直线运动状态,当飞机受平衡力的时候是处于静止状态或匀速直线运动状态,故A正确;
B.电动机是利用通电导线在磁场中受力的作用的原理制成的,电子马达相当于一个电动机,工作时把电能转换成动能。故B正确;
C.机翼的上方是弧形,空气流过上方时流速大,压强小,机翼下方是平面,空气的流速小,压强大,这一压强差使飞机获得竖直向上的升力,当升力大于重力时,无人机受到的合力方向向上,无人机就会升空,故C正确;
D.无人机在匀速上升过程中,质量不变,高度增加,势能增加,但其速度不变,故动能不变。故D错误。

练习册系列答案
 期末冲刺100分创新金卷完全试卷系列答案
期末冲刺100分创新金卷完全试卷系列答案
相关题目

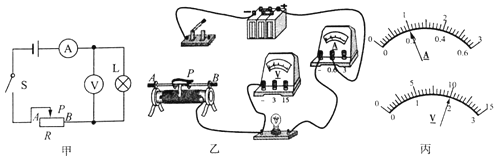
【题目】回顾实验和探究,探究并联电路的电流规律:
器材 | 电源、导线、开关、两个小灯泡、_____. |
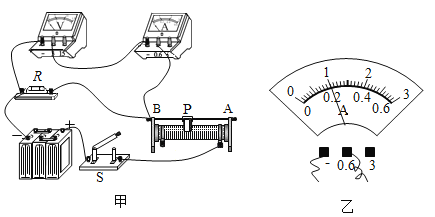
过程 | (1)将灯L1、L2_____联.连接电路时,开关应处于_____状态,目的是_____. (2)将电流表分别L1、L2_____联,测出通过灯泡L1、L2中的电流,通过L1的电流如图甲所示,请连接测量通过L1电流的实物图.
(3)测出干路电流为0.56A,请方框中画出测干路电流的电路图,并在乙图中标出L2中电流. |
结论 | 并联电路中,干路电流等于各支路电流_____. |