题目内容
在研究杠杆的平衡条件的实验中,张华同学发现杠杆的位置如图(a)所示
(1)张华应将右端的平衡螺母向______调节,使杠杆在水平位置平衡,此时杠杆重力的力臂为______.
(2)在杠杆的左侧挂上钩码后,在杠杆右侧用弹簧测力计沿______方向向下拉杠杆,仍要使杠杆在水平位置平衡,这样做的目的是为了______.
(3)实验中改变弹簧测力计的位置,用同样的方法一般要做三次,得到三组数据并进行分析,其目的是______.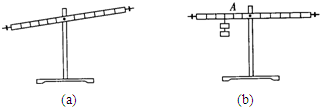
(1)张华应将右端的平衡螺母向______调节,使杠杆在水平位置平衡,此时杠杆重力的力臂为______.
(2)在杠杆的左侧挂上钩码后,在杠杆右侧用弹簧测力计沿______方向向下拉杠杆,仍要使杠杆在水平位置平衡,这样做的目的是为了______.
(3)实验中改变弹簧测力计的位置,用同样的方法一般要做三次,得到三组数据并进行分析,其目的是______.
(1)由图示可知,杠杆左端下沉,应向右调节平衡螺母,使杠杆在水平位置平衡,此时杠杆自身重心在杠杆的支点上,杠杆重力的力臂为零.
(2)在杠杆的左侧挂上钩码后,在杠杆右侧用弹簧测力计沿竖直方向向下拉杠杆,仍要使杠杆在水平位置平衡,
此时力与杠杆垂直,力臂在杠杆上,力的作用点与支点间的距离是力臂,这样便于测量力臂.
(3)实验中改变弹簧测力计的位置,用同样的方法一般要做三次,得到三组数据并进行分析,其目的是多次实验,测出多组数据,使实验结论具有普遍性.
故答案为:(1)右;0;(2)竖直;便于测量力臂;(3)使实验结论具有普遍性.
(2)在杠杆的左侧挂上钩码后,在杠杆右侧用弹簧测力计沿竖直方向向下拉杠杆,仍要使杠杆在水平位置平衡,
此时力与杠杆垂直,力臂在杠杆上,力的作用点与支点间的距离是力臂,这样便于测量力臂.
(3)实验中改变弹簧测力计的位置,用同样的方法一般要做三次,得到三组数据并进行分析,其目的是多次实验,测出多组数据,使实验结论具有普遍性.
故答案为:(1)右;0;(2)竖直;便于测量力臂;(3)使实验结论具有普遍性.

练习册系列答案
相关题目
 (2013?怀柔区一模)小磊同学在“研究杠杆的平衡条件”的实验中,他将杠杆挂在支架上,结果发现杠杆左端向下倾斜.
(2013?怀柔区一模)小磊同学在“研究杠杆的平衡条件”的实验中,他将杠杆挂在支架上,结果发现杠杆左端向下倾斜. 如图所示,在“研究杠杆的平衡条件”的实验中,杠杆上每小格的长度都相同,两边挂上钩码后杠杆平衡,如果把两边的钩码都同时向里移动一个格,则杠杆( )
如图所示,在“研究杠杆的平衡条件”的实验中,杠杆上每小格的长度都相同,两边挂上钩码后杠杆平衡,如果把两边的钩码都同时向里移动一个格,则杠杆( ) 在探究杠杆的平衡条件实验中:
在探究杠杆的平衡条件实验中: