题目内容
【题目】如图甲所示,放在水平地面上的物体,受到方向不变的水平拉力F的作用,F的大小与时间t的关系如图乙所示,物体运动速度v与时间t的关系如图丙所示,由图象可知,在整个过程中,下列说法正确的是( )
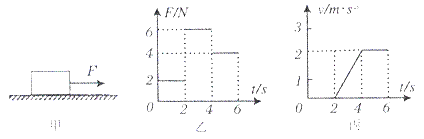
A. 当t=1s时,物体处于静止状态,摩擦力为0N
B. 当t=3s时,物体受到的摩擦力为6N
C. 4~6s内,拉力做的功是16J
D. 2~4s内,物体的机械能保持不变
【答案】C
【解析】解答:A. 由丙图可知,前2s物体速度为零,处于静止状态,合力为零,则水平方向受到的摩擦力和拉力是一对平衡力;由乙图可知,前2s物体所受拉力为2N,所以摩擦力也为2N;故A错误;B. 在t=3s时,由乙图可知,物体受到的拉力为6N,由丙图可知物体正在做加速运动,此时摩擦力与拉力不平衡,物体受到的摩擦力一定不等于6N.故B错误;C. 由丙图可知,4s6s内,物体做匀速直线运动,速度为v=2m/s,则4s6s内通过的距离s=vt=2m/s×2s=4m,由图乙知,4s6s时拉力F=4N,所以46s内拉力F做的功为W=Fs=4N×4m=16J,故C正确。D. 由丙图可知,24s内物体正在做加速运动,其质量不变,高度不变,则重力势能不变,速度变大,动能变大,所以物体的机械能变大。故D错误。
故选C.

练习册系列答案
相关题目