题目内容
【题目】动物的进化会使它们的身体结构和功能更适应环境,下列用压强知识解释错误的是( )
A.啄木鸟的喙又尖又长﹣﹣减小受力面积,增大压强,有利于摄食
B.狗的犬齿很尖﹣﹣减小受力面积,增大压强,有利于撕咬食物
C.鲫鱼的身体呈梭形﹣﹣增大受力面积,减小压强,有利于水中游行
D.骆驼的趾特别宽大﹣﹣增大受力面积,减小压强,有利于沙漠行走
【答案】C
【解析】A、啄木鸟的喙又尖又长 , 是在压力一定的情况,通过减小受力面积来增大压强,有利于摄食,A不符合题意;
B、狗的犬齿很尖,是在压力一定的情况,通过减小受力面积来增大压强.有利于撕咬食物,B不符合题意;
C、鲫鱼的身体呈梭形,是可以在游泳时减少水的阻力,有利于水中游行,适应于在水中生活,C符合题意;
D、骆驼的脚掌很大,是在压力一定的情况,通过增大受力面积来减小压强,有利于沙漠行走,D不符合题意.
故答案为:C .
压强与压力的大小和受力面积的大小有关(p=![]() );在压力一定时,受力面积越小,压强就越大,受力面积越大,其压强越小;在受力面积一定时,压力越大,其压强就越大,压力越小,其压强越小。
);在压力一定时,受力面积越小,压强就越大,受力面积越大,其压强越小;在受力面积一定时,压力越大,其压强就越大,压力越小,其压强越小。

 初中暑期衔接系列答案
初中暑期衔接系列答案

【题目】如图甲所示是一台单缸四冲程汽油机工作状态示意图,由图甲可以看出,此时它所处在冲程,其能量转化情况与(选填“乙”或“丙”)图相同.如果此汽油机飞轮的转速为2400r/min,则每秒内对外做功次. 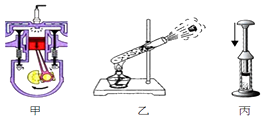



【题目】如图甲所示为一款能自动清扫地面的扫地机器人.机器人通过电动机旋转产生高速气流,将灰尘、杂物吸入集尘盒;其防滑轮皮采用凸凹材质制成;底部安装有塑料刷,用于清扫吸附在地板上的灰尘及轻小物体;前端装有感应器,通过发射、接收超声波或红外线来侦测障碍物.当剩余电量减为电池容量的20%时,机器人会主动寻找充电器充电.表一为某扫地机器人的部分参数.电池容量指放电电流与放电总时间的乘积. 
表一:
额定工作电压 | 12V | 额定功率 | 30W |
电池容量 | 2500mAh | 工作噪音 | <50dB |
净重 | 4kg | 最大集尘量 | 1kg |
机器人中吸尘电机的吸入功率是衡量其优劣的重要参数,测得某吸尘电机的吸入功率与真空度、风量间的对应关系如表二.真空度指主机内部气压与外界的气压差.风量指单位时间内通过吸尘电机排出的空气体积.吸尘电机吸入功率与输入功率的比值叫做效率.表二:
真空度(Pa) | 400 | 450 | 500 | 550 | 600 |
风量(m3/s) | 0.025 | 0.02 | 0.017 | 0.015 | 0.013 |
吸入功率(W) | 10 | 9 | 8.5 | 7.8 |
(1)机器人工作时,主机内部的气压(选填“大于”、“小于”或“等于”)大气压而产生吸力.若该机器人向障碍物垂直发射超声波,经过0.001s收到回波,则其发射超声波时与障碍物间的距离为cm.(设超声波在空气中的传播速度为340m/s)
(2)该机器人充满电后至下一次自动充电前,能够连续正常工作的最长时间为min.
(3)由表二数据可知,当风量为0.015m3/s时,吸尘电机吸入功率为W,若吸尘电机的输入功率为25W,此时其效率为%.
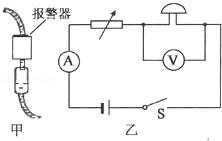
(4)光敏电阻是制作灰尘传感器的常用元件.图乙为某机器人中吸尘电机内部的光敏电阻的控制电路,两端总电压U0恒定(U0<12V),RG为光敏电阻,其阻值随空气透光程度的变化而变化,R0为定值电阻.当光敏电阻分别为6Ω和18Ω时,电压表的示数分别为4.5V和2.25V,则R0=Ω.
(5)若机器人1秒钟消耗的电能中有40%用于克服摩擦力做功.已知集尘盒空置时,机器人匀速运动时受到的摩擦阻力为16N,查阅资料显示摩擦力与压力成正比,则达到最大集尘量时机器人运动的速度为多少?(写出必要计算步骤)