题目内容
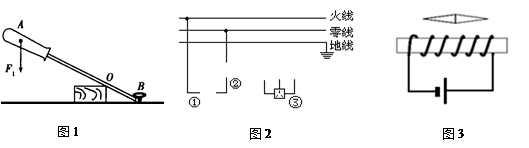
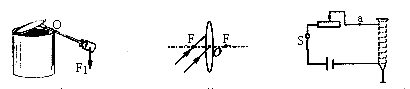
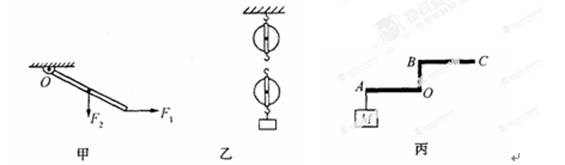
(1)画出图甲中的动力臂l1和阻力臂l2.
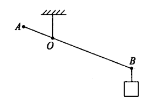
(2)利用图乙中的定滑轮和动滑轮绕制滑轮组,要求能够改变用力的方向.
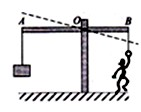
(3)物体M在杠杆AOBC作用下如图丙位置静止,试在C点作出使杠杆在如图位置平衡时的最小力(O为支点).
(2)利用图乙中的定滑轮和动滑轮绕制滑轮组,要求能够改变用力的方向.
(3)物体M在杠杆AOBC作用下如图丙位置静止,试在C点作出使杠杆在如图位置平衡时的最小力(O为支点).
试题分析:甲图:力臂的作图要注意:过力的作用点沿力的方向作一条直线用虚线表示,叫力的作用线。过支点O向力的作用线作垂线,支点O到垂足的距离即为力臂。最后力臂用大括弧表示出。乙图:要求改变力的方向,可以从外向内作出方法是先从定滑轮的边缘向下画一带箭头的线段,再沿箭头的反方向绕过定滑轮及动滑轮,直至绕至滑轮的鈎上即可答案见图;丙图要求最小力。方法是求作最大力臂,由几何知识可得,从支点到力的作用点连线作为力臂时力臂最大即对应的力最小。答案见图

练习册系列答案
相关题目