题目内容
图所示电路中能正确测出灯L1的电流的是( )
A. 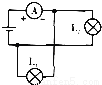 B.
B.  C.
C.  D.
D. 


练习册系列答案
相关题目

小余和小乐为了探究并联电路中电流的关系,他们设计的电路如图甲所示.实验器材如下:规格不同的灯泡各一只、电压可调节的学生电源1个、电流表1个、开关1个、导线若干.

(1)在连接电路的过程中,开关应该处于 状态.
(2)电流表校正好后,用此电流表试触时,小余发现电流表的指针偏转如图乙所示,根据你的分析,原因是 .
(3)他们改进后,把电流表分别接入到电路中的 A、B、C 处,测出的电流如下表:
实验次数 | A | 处的电流 | IA/A | B | 处的电流 | IB/A | C | 处的电流 | IC/A |
1 | 0.14 | 0.28 | 0.42 |
|
|
|
|
|
|
2 | 0.16 | 0.32 | 0.48 |
|
|
|
|
|
|
3 | 0.18 | 0.36 | 0.54 |
|
|
|
|
|
|
通过对上面数据的分析,可以得出的结论是:在并联电路中, ;在实验中可以通过改变 来改变A、B、C处电流的大小,从而进行多次实验,这样做的目的是 .