题目内容
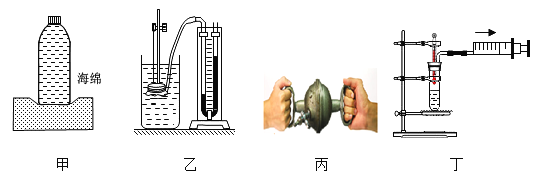
【题目】小明同学探究杠杆平衡条件的实验时,以杠杆中点为支点。

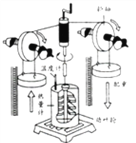
(1)如图甲所示,挂钩码前,杠杆在图甲所示的位置静止,此时杠杆___(选填“达到”或“没有达到”)平衡状态,小明发现杠杆右端低左端高,要使它在水平位置平衡,应将杠杆右端的平衡螺母向______调节。小明调节杠杆在水平位置平衡的主要目的是便于直接测量__________。
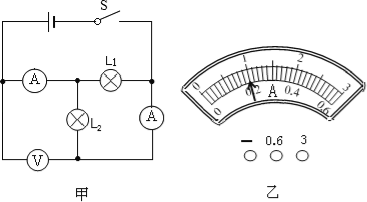
(2)如图乙所示,在杠杆左边A处挂4个相同钩码,要使杠杆在水平位置平衡,应在杠杆右边B处挂同样钩码_____个。
(3)如图丙所示,分别用拉力F1和F2使杠杆在水平位置平衡,则F1______F2,其原因是F1的力臂______F2的力臂(填“大于”“小于”或“等于”)。
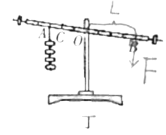
(4)接着再用拉力F3使杠杆在图丁所示位置平衡时,则F1__________F3(填“大于”“小于”或“等于”)。
(5)撤去F3,若要求杠杆仍在图丁所示位置平衡,请在B点处画出最小的动力F及其力臂l。
(________)
【答案】达到 左 力臂 3 小于 大于 等于 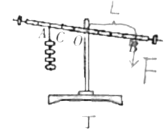
【解析】
第一空.杠杆平衡时状态有静止状态和匀速转动状态,因此杠杆在图甲所示的位置静止,此时杠杆达到平衡状态;
第二空.实验前,杠杆右端下降,左端上翘,应将杠杆重心向左移,即应将杠杆右端的平衡螺母向左调节,使杠杆在水平位置平衡;
第三空.当杠杆在水平位置平衡时,力的方向与杠杆垂直,力臂等于支点到力的作用线的距离,力臂可以从杠杆标尺刻度上直接读出来;
第四空.设一个钩码的重力为G,杠杆一个小格代表l,
图中,杠杆的左端:4G×3l=12Gl,
B处的力臂为4l,杠杆的右端:F2×4l=12Gl,解得F2=3G,即在B处挂3个同样的钩码;
第五空.如图丙所示,分别用拉力F1和F2使杠杆在水平位置平衡,则F1![]() F2,理由如下:
F2,理由如下:
第六空.F1的力臂大于F2的力臂,根据杠杆平衡条件得,F1<F2;
第七空.根据几何知识可知,用拉力F3使杠杆在图丁所示位置平衡与在水平位置平衡相比,钩码拉力的力臂和F3的力臂的比值不变,所以F1等于F3;
第八空.撤去F3,杠杆仍在图丁所示位置平衡,当动力臂最大时,动力F最小,最大动力臂为OB,因此在B点处最小的动力F与OB垂直,方向向下,其力臂l为OB,如图所示:

 同步练习强化拓展系列答案
同步练习强化拓展系列答案