题目内容
【题目】如图甲所示为一款能自动清扫地面的扫地机器人.机器人通过电动机旋转产生高速气流,将灰尘、杂物吸入集尘盒;其防滑轮采用凹凸材质制成;底部安装有塑料刷,用于清扫吸附在地板上的灰尘及轻小物体;前端装有感应器,通过发射、接收超声波或红外线来侦测障碍物.当剩余电量减为电池容量的20%时,机器人会主动寻找充电器充电.表一为某扫地机器人的部分参数.电池容量指放电电流与放电总时间的乘积.

表一:

机器人中吸尘电机的吸入功率是衡量其优劣的重要参数,现测得某吸尘电机的吸入功率与真空度、风量间的对应关系如表二.真空度指主机内部气压与外界的气压差.风量指单位时间内通过吸尘电机排出的空气体积.吸尘电机吸入功率与输入功率的比值叫做效率.
表二:

(1)机器人工作时,主机内部的气压___(选填“大于”、“小于”或“等于”)大气压而产生吸力.若该机器人向障碍物垂直发射超声波,经过0.001s收到回波,则其发射超声波时与障碍物间的距离为___cm.(设超声波在空气中的传播速度为340m/s)
(2)该机器人充满电后至下一次自动充电前,能够连续正常工作的最长时间为___min.
(3)由表二数据可知,当风量为0.015m3/s时,吸尘电机吸入功率为___W,若吸尘电机的输入功率为25W,此时其效率为___%.
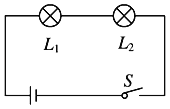
(4)光敏电阻是制作灰尘传感器的常用元件.图乙为某机器人中吸尘电机内部的光敏电阻的控制电路,两端总电压U0恒定(U0<12V),RG为光敏电阻,其阻值随空气透光程度的变化而变化,R0为定值电阻.当光敏电阻分别为6Ω和18Ω时,电压表的示数分别为4.5V和2.25V,则R0=___Ω.
(5)若机器人1秒钟消耗的电能中有40%用于克服摩擦力做功.已知集尘盒空置时,机器人匀速运动时受到的摩擦阻力为16N,查阅资料显示摩擦力与压力成正比,则达到最大集尘量时机器人运动的速度为多少____?(写出必要计算步骤)
【答案】 小于 17 48 8.25 33% 6 0.6m/s
【解析】(1)由流体压强与流速的关系:流速越大的位置压强越小可知,机器人在工作时,由于转动的扇叶处气体的流速大,压强小,在外界大气压的作用下将灰尘、杂物吸入集尘盒,故主机内部的气压小于大气压而产生吸力。由v=s/t得,超声波从发射到收到回波所通过的总路程:s总=vt=340m/s×0.001s=0.34m,
则其发射超声波时与障碍物间的距离:s=s总/2=0.34m/2=0.17m=17cm;
(2)由P=IU得,机器人正常工作时的电流:I=P/U=30W/12V=2.5A;
机器人充电过程是将电能转化为化学能储存起来;充满电后的电池容量Q1=2500mAh,下一次自动充电前的电池容量Q2=ηQ1=20%2500mAh=500mAh,
消耗的电池容量Q=Q1-Q2=2500mAh-500mAh=2000mAh,正常工作时的电流I=2.5A=2500mA,由I=Q/t得,连续正常工作的最长时间:t=Q/I=2000mAh/2500mA=0.8h=48min;
(3)由表格中数据可知,吸入功率等于真空度与风量的乘积,当风量为0.015m3/s时,吸尘电机吸入功率:P吸入=550Pa×0.015m3/s=8.25W;
此时其效率:η电机═P吸入/P输入×100%=8.25W/25W×100%=33%;
(4)由电路图可知,光敏电阻RG和定值电阻R0串联,电压表测定值电阻R0两端的电压,当光敏电阻RG1 =6Ω时,电压表的示数U1 =4.5V,光敏电阻两端的电压U=U0-U1,此时电路中的电流:I1 =U1/R0=U0U1/RG1,即4.5V/R0=U04.5V/6Ω…①
当光敏电阻RG2=18Ω时,电压表的示数U2=2.25V,光敏电阻两端的电压U′=U0-U2,此时电路中的电流:I2=U2/R0=U0U2/RG2,即2.25V/R0=U02.25V/18Ω…②
联立①②可解得:U0=9V,R0=6Ω,
(5)吸尘器压力等于其重力,由题可知,摩擦力与压力成正比,则集尘盒空置和达到最大最大集尘量时的摩擦力之比:f1/f2=kG1/kG2=G1/G2=m1/m2,
即:16N/f2=4kg/4kg+1kg,所以,达到最大最大集尘量时的摩擦力:f2=20N;
因为消耗的电能中有40%用于克服摩擦力做功,所以P机械=40%P电=0.4×30W=12W,机器人做匀速运动,由P机械=W/t=Fs/t=Fv=f2v可得,机器人运动的速度:v=P机械/f2=12W/20N=0.6m/s。