题目内容
 某实验小组利用图所示装置研究杠杆的机械效率,实验的主要步骤如下:
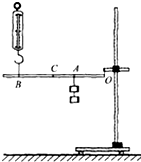
某实验小组利用图所示装置研究杠杆的机械效率,实验的主要步骤如下:①用轻绳悬挂杠杆一端的O点作为支点,在A点用轻绳悬挂总重为G的两个钩码,在B点用轻绳竖直悬挂一个弹簧测力计,使杠杆保持水平;
②竖直向上拉动弹簧测力计缓慢匀速上升(保持O点位置不变),在此过程中弹簧测力计的读数为F,利用刻度尺分别测出A、B两点上升的高度为h1、h2.(不考虑摩擦)
回答下列问题:
(1)杠杆机械效率的表达式η1=
| Gh1 |
| Fh2 |
| Gh1 |
| Fh2 |
(2)本次实验中,若提升的钩码重一定,则影响杠杆机械效率的主要因素是:
杠杆自身的重力
杠杆自身的重力
.(3)将三个相同的钩码悬挂在A点匀速提高相同高度时,该杠杆的机械效率为η2,则η2
>
>
η1.(填“<”“=”或“>”)(4)将同一物体分别悬挂在A、C两点,匀速提高相同高度时的机械效率分别为ηA和ηC,则ηA
<
<
ηC.(填“<”“=”或“>”)(5)实验结束后,小明分析测量的数据发现:用弹簧测力计竖直向上拉,使杠杆处于水平状态平衡时,测出的拉力F×0B≠G×0A,其原因是:
杠杆自重的影响.
杠杆自重的影响.
.分析:(1)使用杠杆克服钩码的重力做功,有用功等于克服钩码重力做的功,总功等于弹簧测力计的拉力做的功,机械效率等于有用功和总功的比值;
(2)机械效率是有用功和总功的比值,它反映了有用功在总功中所占比例的大小,也反映了额外功所占比例的大小,影响机械效率的因素从有用功和额外功两方面考虑;
(3)根据影响杠杆机械效率的主要因素--杠杆的自身重力不变分析,然后根据η=
=
解答;
(4)将钩码的悬挂点从A点移至C点,改变了钩码重力的力臂,根据杠杆平衡条件分析,改变了弹簧测力计的拉力,改变了弹簧测力计的拉力做功的多少,改变了机械效率的高低.
(5)弹簧测力计不但提了钩码,而且还提了杠杆,杠杆的重力对杠杆转动产生了影响.
(2)机械效率是有用功和总功的比值,它反映了有用功在总功中所占比例的大小,也反映了额外功所占比例的大小,影响机械效率的因素从有用功和额外功两方面考虑;
(3)根据影响杠杆机械效率的主要因素--杠杆的自身重力不变分析,然后根据η=
| W有用 |
| W总 |
| W有用 |
| W有用+W额 |
(4)将钩码的悬挂点从A点移至C点,改变了钩码重力的力臂,根据杠杆平衡条件分析,改变了弹簧测力计的拉力,改变了弹簧测力计的拉力做功的多少,改变了机械效率的高低.
(5)弹簧测力计不但提了钩码,而且还提了杠杆,杠杆的重力对杠杆转动产生了影响.
解答:解:(1)有用功为W有=Gh1,总功W总=Fh2,则机械效率的表达式η=
×100%=
×100%.
(2)有用功是提升钩码所做的功,额外功主要是克服杠杆重力做的功,影响机械效率的因素主要是有用功和总功所占的比例;提升的钩码重一定说明有用功一定,所以影响杠杆机械效率的主要因素是杠杆自身的重力.
(3)将三个相同的钩码悬挂在A点匀速提高相同高度时,根据W=Gh可知:W有用1<W有用2,
∵杠杆的自身重力不变,
∴根据W额=G杆h可知额外功不变,
∵η=
=
;
∴η2>η1.
(4)钩码的悬挂点在A点时,由杠杠的平衡条件得G?OA=F?OB;悬挂点移至C点时,由杠杠的平衡条件得G?OC=F?OB,经对比发现,由OA到OC时力臂变大,所以拉力F也变大,因钩码匀速提高相同高度时则杠杆提升的高度减小,所以根据W额=Gh可知额外功减小,因此在有用功相同的条件下,杠杆的机械效率变大,即ηA<ηC.
(5)由图可知杠杆的重心不在支点上,杠杆的重力对杠杆转动产生了影响,导致拉力F的大小比由杠杆平衡条件计算出来的数值偏大.
故答案为:(1)
×100%;(2)杠杆自身的重力;(3)>;(4)<;(5)杠杆自重的影响.
| W有用 |
| W总 |
| Gh1 |
| Fh2 |
(2)有用功是提升钩码所做的功,额外功主要是克服杠杆重力做的功,影响机械效率的因素主要是有用功和总功所占的比例;提升的钩码重一定说明有用功一定,所以影响杠杆机械效率的主要因素是杠杆自身的重力.
(3)将三个相同的钩码悬挂在A点匀速提高相同高度时,根据W=Gh可知:W有用1<W有用2,
∵杠杆的自身重力不变,
∴根据W额=G杆h可知额外功不变,
∵η=
| W有用 |
| W总 |
| W有用 |
| W有用+W额 |
∴η2>η1.
(4)钩码的悬挂点在A点时,由杠杠的平衡条件得G?OA=F?OB;悬挂点移至C点时,由杠杠的平衡条件得G?OC=F?OB,经对比发现,由OA到OC时力臂变大,所以拉力F也变大,因钩码匀速提高相同高度时则杠杆提升的高度减小,所以根据W额=Gh可知额外功减小,因此在有用功相同的条件下,杠杆的机械效率变大,即ηA<ηC.
(5)由图可知杠杆的重心不在支点上,杠杆的重力对杠杆转动产生了影响,导致拉力F的大小比由杠杆平衡条件计算出来的数值偏大.
故答案为:(1)
| Gh1 |
| Fh2 |
点评:本题考查杠杆机械效率的测量,把握有用功、总功的计算方式,明确机械效率的表达式,知道提高机械效率的方法.当杠杆处于水平位置平衡时,竖直作用在杠杆上的力的力臂在杠杆上,倾斜作用在杠杆上力的力臂在杠杆以外的位置上,力臂变小.

练习册系列答案
相关题目
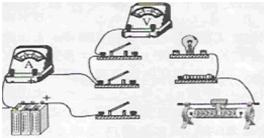
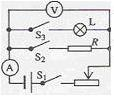
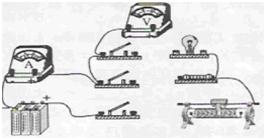
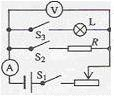
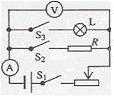
 某兴趣小组利用图所示电路进行如下的实验研究.
某兴趣小组利用图所示电路进行如下的实验研究.| 1 | 2 | 3 | 4 | |
| U/V | 2.0 | 3.0 | 4.0 | 5.0 |
| I/A | 0.20 | 0.29 | 0.40 | 0.51 |
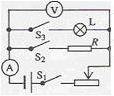
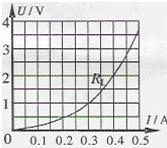
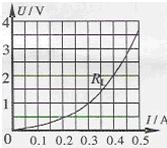
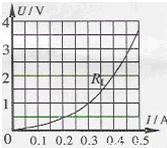
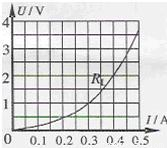
(2)断开S2,闭合S1、S3,调节滑动变阻器,测量灯泡L两端的电压和电流,根据测量数据绘制成如图的U-I关系图象.由图象分析,当电压表示数为2V时,灯泡L的电阻RL=
(3)闭合S1、S2和S3,调节滑动变阻器,当电压表示数为2V时,电流表的示数是
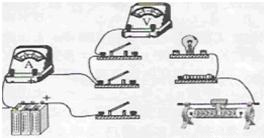
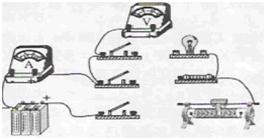
(4)根据图完成本实验的实物线路的连接(图中还有4条未接).
(5)闭合开关前,滑动变阻器的滑片应放在
(6)实验过程中,滑动变阻器的滑片向右移动时灯丝将变
(7)若实验过程中电流表的读数突然变大,而电压表的读数为0,经检测电压表没有损坏.可能发生的故障是
 某兴趣小组利用图所示电路进行如下的实验研究.
某兴趣小组利用图所示电路进行如下的实验研究.
| 1 | 2 | 3 | 4 | |
| U/V | 2.0 | 3.0 | 4.0 | 5.0 |
| I/A | 0.20 | 0.29 | 0.40 | 0.51 |
(2)断开S2,闭合S1、S3,调节滑动变阻器,测量灯泡L两端的电压和电流,根据测量数据绘制成如图的U-I关系图象.由图象分析,当电压表示数为2V时,灯泡L的电阻RL=______Ω.
(3)闭合S1、S2和S3,调节滑动变阻器,当电压表示数为2V时,电流表的示数是 ______A.
(4)根据图完成本实验的实物线路的连接(图中还有4条未接).
(5)闭合开关前,滑动变阻器的滑片应放在 ______端(选填“左”或“右”).
(6)实验过程中,滑动变阻器的滑片向右移动时灯丝将变 ______(选填“亮”或“暗”).
(7)若实验过程中电流表的读数突然变大,而电压表的读数为0,经检测电压表没有损坏.可能发生的故障是 ______
 某兴趣小组利用图所示电路进行如下的实验研究.
某兴趣小组利用图所示电路进行如下的实验研究.| 1 | 2 | 3 | 4 | |
| U/V | 2.0 | 3.0 | 4.0 | 5.0 |
| I/A | 0.20 | 0.29 | 0.40 | 0.51 |
(2)断开S2,闭合S1、S3,调节滑动变阻器,测量灯泡L两端的电压和电流,根据测量数据绘制成如图的U-I关系图象.由图象分析,当电压表示数为2V时,灯泡L的电阻RL=______Ω.
(3)闭合S1、S2和S3,调节滑动变阻器,当电压表示数为2V时,电流表的示数是 ______A.
(4)根据图完成本实验的实物线路的连接(图中还有4条未接).
(5)闭合开关前,滑动变阻器的滑片应放在 ______端(选填“左”或“右”).
(6)实验过程中,滑动变阻器的滑片向右移动时灯丝将变 ______(选填“亮”或“暗”).
(7)若实验过程中电流表的读数突然变大,而电压表的读数为0,经检测电压表没有损坏.可能发生的故障是 ______
 某兴趣小组利用图所示电路进行如下的实验研究.
某兴趣小组利用图所示电路进行如下的实验研究.| 1 | 2 | 3 | 4 | |
| U/V | 2.0 | 3.0 | 4.0 | 5.0 |
| I/A | 0.20 | 0.29 | 0.40 | 0.51 |
(2)断开S2,闭合S1、S3,调节滑动变阻器,测量灯泡L两端的电压和电流,根据测量数据绘制成如图的U-I关系图象.由图象分析,当电压表示数为2V时,灯泡L的电阻RL=______Ω.
(3)闭合S1、S2和S3,调节滑动变阻器,当电压表示数为2V时,电流表的示数是 ______A.
(4)根据图完成本实验的实物线路的连接(图中还有4条未接).
(5)闭合开关前,滑动变阻器的滑片应放在 ______端(选填“左”或“右”).
(6)实验过程中,滑动变阻器的滑片向右移动时灯丝将变 ______(选填“亮”或“暗”).
(7)若实验过程中电流表的读数突然变大,而电压表的读数为0,经检测电压表没有损坏.可能发生的故障是 ______