题目内容
【题目】小明在“探究杠杆的平衡条件”实验中,所有的器材有:杠杆、支架、弹簧测力计、刻度尺、细线和质量相同的钩码若干个.

(1)实验前,将杠杆中点置于支架上,发现杠杆左端偏高,应向_____端调节平衡螺母,使杠杆水平平 衡;实验中,使杠杆在水平位置平衡,这样做的好处是便于在杠杆上直接测量_____.
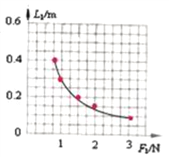
(2)实验过程中,将钩码悬挂于图甲中 A 点,保持阻力、阻力臂不变,在支点 O 右侧不同位置,用弹簧测力计施加竖直向下的拉力(动力),使杠杆水平平衡,测出每一组动力臂 L1 和对应的动力 F1,并记 录在表中.请根据表中数据,在坐标系中绘制出 L1 与 F1 的图象_____; 根据图象中实验数据可知,当 L1 为 0.6m 时,F1 为_____N.
(3)实验中小明得出结论:杠杆平衡条件是 动力×动力臂=阻力×阻力臂; 同组的小华认为还可以得出结论:杠杆平衡条件是 动力×支点到动力作用点的距离=阻力×支点到阻力 作用点的距离.你支持_____结论(小明/小华),并设计实验步骤反驳另一学生的结论_____.

(4)学以致用从地面上搬起重物我们的常见做法是弯腰(如图甲)或人下蹲弯曲膝盖(如图乙)把它搬起来,哪种方法好呢?下面就建立模型说明这个问题.把脊柱简化为杠杆如图丙所示,脊柱可绕骶骨(轴)O 转 动,腰背部复杂肌肉的等效拉力 F1 作用在 A 点,其实际作用方向与脊柱夹角为 12°且保持不变,搬箱 子拉力 F2作用在肩关节 B 点,在 B 点挂一重物代替箱子.用测力计沿 F1 方向拉,使模型静止,可测出 腰背部复杂肌肉拉力的大小.接着,改变脊柱与水平面的夹角即可改变杠杆与水平面的夹角 α,多次实验得出结论.
(a)当 α 角增大时,L2_____(变大/不变/变小),F1_____(变大/不变/变小).
(b)如果考虑到人上半身的重力,那么腰背部肌肉的实际拉力将比丙图中 F1要_____(大/小).
(c)对比甲乙两种姿势所对应丙图中的两种状态,由以下分析可得,_____(甲/乙)图中的姿势比较正确.
【答案】 左 力臂  0.5 小明 取下一侧的钩码,用测力计斜拉杠杆,使杠杆在水平位置平衡,测出此力的力臂,记下测力计的示数,此时动力×支点到动力作用点的距离≠阻力×支点到阻力作用点的距离 变小 变小 大 【答题空10】乙.
0.5 小明 取下一侧的钩码,用测力计斜拉杠杆,使杠杆在水平位置平衡,测出此力的力臂,记下测力计的示数,此时动力×支点到动力作用点的距离≠阻力×支点到阻力作用点的距离 变小 变小 大 【答题空10】乙.
【解析】(1)当杠杆在水平位置平衡时,拉力与杠杆垂直,所以从杠杆上可以直接读出力臂,故实验时为了便于测量力臂,所以使杠杆在水平位置平衡,调节杠杆平衡时,哪端高向哪端调节平衡螺线,所以实验前发现杠杆左端偏高,应向左端调节平衡螺母;
(2)根据表格数据描点,然后用平滑的曲线连接,如图:
根据实验数据和杠杆的平衡条件可知,动力乘以动力臂为, ![]()
因为杠杆平衡,所以当L1为0.6m时,该乘积也应为: ![]()
解得,F1为0.5N;
(3)根据杠杆的平衡条件可知,当然小明的结论是正确的。因为实验中杠杆是在水平位置平衡的,所以支点到力的作用点的距离正好等于力臂,故小华得出了不正确的结论,当力与杠杆不垂直时,些结论变会不成立了,据此设计实验。
设计实验验证:
可以取下一侧的钩码,用测力计斜着拉杠杆,仍然使杠杆在水平位置平衡,我们知道斜着拉杠杆,此力必须会增大,所以代入小华的结论就不成立了。
再测出此力的力臂,代入平衡条件,又可验证小明的结论正确。
(4)(a)由丙图作出拉力F2的力臂L2,即阻力的力臂如图,

可以看出,当α角增大时,阻力L2会变小,由于腰背部复杂肌肉的等效拉力F1作用在A点,其实际作用方向与脊柱夹角为 12°且保持不变,即动力臂不变,根据杠杆的平衡条件,因为阻力不变,动力臂不变,所以阻力臂减小时,动力F1也变小;
(b)如果考虑到人上半身的重力,等于增加了阻力,根据杠杆杠杆平衡条件,动力也增大,所以腰背部肌肉的实际拉力将比丙图中F1要大;
(c)如图甲弯腰搬起重物时,相当于图丙中的α角较小的状态,以上分析可知,需要较大的肌肉拉力才能使杠杆平衡,即搬起重物,对关节,肌肉不利;
图乙下蹲弯曲膝盖搬起重物时,相当于图丙中的α角较大的状态,需要较小的力就可便杠杆平衡,所以对脊柱关节和肌肉有利,固乙姿势比较正确。
答案: (1). 左 (2). 力臂 (3). (4). 0.5 (5). 小明 (6). 取下一侧的钩码,用测力计斜拉杠杆,使杠杆在水平位置平衡,测出此力的力臂,记下测力计的示数,此时动力×支点到动力作用点的距离≠阻力×支点到阻力作用点的距离 (7). 变小 (8). 变小 (9). 大 (10). 乙