摘要:8AB 应用系统机械能守恒2mgL-mgL=3mv2/2,可以求出两速度的大小,A正确.对m小球应用牛顿第二定律.mg-N=mv2/L.可以求解N的大小.B正确.当杆转到竖直位置时.由于两球均有向心加速度.以整体为研究对象.铁钉对杆的作用不可能等于总的重力.由机械能守恒.杆最多转到水平位置.速度又将变为0. 9AD 从图象可以看出A答案正确.但如果用计算的方法来比较两者的输出功率和效率问题.则比较困难.作出电阻的U-I图象.其交点的坐标为电阻与电源相接时的电流与电压.如图.不论电阻是多大.只要外接电阻相等.电源1的输出功率一定大.所以D正确.10(1)电火花式计时器 匀速运动(2)M>>m 小车的质量
网址:http://m.1010jiajiao.com/timu_id_284999[举报]
(2010?苏州二模)某同学想利刚如图(a)所示的装置来验证由小车A与重物B组成的系统机械能守恒.
(1)现提供如下器材:
A.小车 B.重物
C.一端带滑轮的长木板 D.细绳
E.电火花计时器 F.纸带
G.毫米刻度尺 H.低压交流电源
I.220V交流电源 J.6V蓄电池
K.天平
实验中不需要的器材是
(2)对重物B质量的选择要求是
A.质量大一些
B.质量小一些
(3)主要实验步骤
A.用天平分别测出小车及重物的质量为M、m
B.按图安装好装置:将带滑轮的平板水平放置,挂重物后,细绳须与木板平行
C.将小车拉至靠近打点计时器,接通电源,释放小车
D.关闭电源、取下纸带,并重复多次,得到儿条打点纸带.选用点迹清晰的纸带进行数据处理实验中有一重大疏漏,请指出并改正
(4)数据处理
将改正实验疏漏后得到的纸带,去掉前面比较密集的点,选择点迹清晰且便于测量的连续点0-6,测出各点间距离如图(b)所示,已知电火花计时器的打点周期为T,要验证在第l点与第5点时系统的机械能相等,则在误差范围内应满足关系

查看习题详情和答案>>
(1)现提供如下器材:
A.小车 B.重物
C.一端带滑轮的长木板 D.细绳
E.电火花计时器 F.纸带
G.毫米刻度尺 H.低压交流电源
I.220V交流电源 J.6V蓄电池
K.天平
实验中不需要的器材是
HJ
HJ
(填写选项前的字母).(2)对重物B质量的选择要求是
A
A
(填写选项前的字母).A.质量大一些
B.质量小一些
(3)主要实验步骤
A.用天平分别测出小车及重物的质量为M、m
B.按图安装好装置:将带滑轮的平板水平放置,挂重物后,细绳须与木板平行
C.将小车拉至靠近打点计时器,接通电源,释放小车
D.关闭电源、取下纸带,并重复多次,得到儿条打点纸带.选用点迹清晰的纸带进行数据处理实验中有一重大疏漏,请指出并改正
应平衡摩擦力
应平衡摩擦力
.(4)数据处理
将改正实验疏漏后得到的纸带,去掉前面比较密集的点,选择点迹清晰且便于测量的连续点0-6,测出各点间距离如图(b)所示,已知电火花计时器的打点周期为T,要验证在第l点与第5点时系统的机械能相等,则在误差范围内应满足关系
mg(d5-d1)=
(M+m)[(d6-d4)2-d22]
| 1 |
| 8T2 |
mg(d5-d1)=
(M+m)[(d6-d4)2-d22]
| 1 |
| 8T2 |
 如图所示,一质量为m的重物放在水平地面上,上端用一根轻弹簧相连.现用手拉弹簧的上端P缓慢向上移动.当P点位移为H时,物体离开地面一段距离h,则在此过程中( )
如图所示,一质量为m的重物放在水平地面上,上端用一根轻弹簧相连.现用手拉弹簧的上端P缓慢向上移动.当P点位移为H时,物体离开地面一段距离h,则在此过程中( )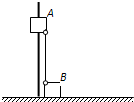 如图所示,滑块A、B的质量均为m,A套在固定竖直杆上,A、B通过转轴用长度为L的刚性轻杆连接,B放在水平面上并靠着竖直杆,A、B均静止.由于微小的扰动,B开始沿水平面向右运动.不计一切摩擦,滑块A、B视为质点.在A下滑的过程中,下列说法中正确的是( )
如图所示,滑块A、B的质量均为m,A套在固定竖直杆上,A、B通过转轴用长度为L的刚性轻杆连接,B放在水平面上并靠着竖直杆,A、B均静止.由于微小的扰动,B开始沿水平面向右运动.不计一切摩擦,滑块A、B视为质点.在A下滑的过程中,下列说法中正确的是( )(2011?淮安三模)某研究性学习小组利用气垫导轨验证机械能守恒定律,实验装置如图甲所示.在气垫导轨上相隔一定距离的两处安装两个光电传感器A、B,滑块P上固定一遮光条,若光线被遮光条遮挡,光电传感器会输出高电压,两光电传感器采集数据后与计算机相连.滑块在细线的牵引下向左加速运动,遮光条经过光电传感器A、B时,通过计算机可以得到如图乙所示的电压U随时间t变化的图象.

(1)实验前,接通气源,将滑块(不挂钩码)置于气垫导轨上,轻推滑块,当图乙中的△t1
(2)用螺旋测微器测遮光条宽度d,测量结果如图丙所示,则d=
(3)滑块P用细线跨过气垫导轨左端的定滑轮与质量为m的钩码Q相连,将滑块P由图甲所示位置释放,通过计算机得到的图象如图乙所示,若△t1、△t2和d已知,要验证滑块和砝码组成的系统机械能是否守恒,还应测出
(4)若上述物理量间满足关系式
查看习题详情和答案>>
(1)实验前,接通气源,将滑块(不挂钩码)置于气垫导轨上,轻推滑块,当图乙中的△t1
=
=
△t2(选填“>”、“=”或“<”)时,说明气垫导轨已经水平.(2)用螺旋测微器测遮光条宽度d,测量结果如图丙所示,则d=
8.474
8.474
mm.(3)滑块P用细线跨过气垫导轨左端的定滑轮与质量为m的钩码Q相连,将滑块P由图甲所示位置释放,通过计算机得到的图象如图乙所示,若△t1、△t2和d已知,要验证滑块和砝码组成的系统机械能是否守恒,还应测出
滑块质量M
滑块质量M
和两光电门间距离L
两光电门间距离L
(写出物理量的名称及符号).(4)若上述物理量间满足关系式
mgL=
(m+M)(
)2-
(m+M)(
)2
| 1 |
| 2 |
| d |
| △t2 |
| 1 |
| 2 |
| d |
| △t1 |
mgL=
(m+M)(
)2-
(m+M)(
)2
,则表明在上述过程中,滑块和砝码组成的系统机械能守恒.| 1 |
| 2 |
| d |
| △t2 |
| 1 |
| 2 |
| d |
| △t1 |