网址:http://m.1010jiajiao.com/timu_id_1078289[举报]
| 计数点 | A | B | C | D | E | F |
| h(cm) | 6.93 | 9.47 | 12.4 | 15.71 | 19.41 | 23.49 |
| v(m/s) | 1.16 | 1.37 | 1.56 | 1.75 | 1.95 | 2.14 |
| v2(m2/s2) | 1.35 | 1.88 | 2.43 | 3.06 | 4.05 | 4.58 |
②计数点D、E、F与O点之间的距离分别用hD、hE、hF表示,打点计时器的打点周期用T表示,则打下计数点E时纸带的速度vE=
③该小组的同学在坐标纸上建立图丙所示坐标系,标出了各组测量数据的坐标点,并在坐标系中画出v2-h图线.由图线可以判断计数点
④下判断中正确的是
A.在误差允许的范围内,该实验小组达到了实验目的
B.该地的重力加速度比g测偏大
C.她们实验操作过程中是先释放纸带然后再闭合打点计时器开关
D.实验过程中阻力引起的误差属于系统误差.
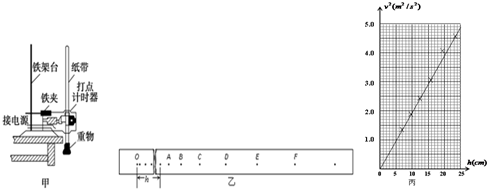
某实验小组利用图甲装置做“验证机械能守恒定律”实验,图乙是她们选择的一条较理想的纸带,O点是打点计时器打出的第一个点,计数点A、B、C、D、E、F是纸带上相邻的点。她们测出了各点与O点的距离![]() 后做出了必要的计算,测量和计算的记录见下表(计数点的速度用
后做出了必要的计算,测量和计算的记录见下表(计数点的速度用![]() 表示)
表示)

| 计数点 | A | B | C | D | E | F |
|
| 6.93 | 9.47 | 12.4 | 15.71 | 19.41 | 23.49 |
|
| 1.16 | 1.37 | 1.56 | 1.75 | 1.95 | 2.14 |
|
| 1.35 | 1.88 | 2.43 | 3.06 | 4.05 | 4.58 |
①测量某点与O点距离![]() 的记录中不合理的一组是 (填写计数点名称)
的记录中不合理的一组是 (填写计数点名称)
②计数点D、E、F与O点之间的距离分别用![]() 、
、![]() 、
、![]() 表示,打点计时器的打点周期用T表示,则打下计数点E时纸带的速度
表示,打点计时器的打点周期用T表示,则打下计数点E时纸带的速度![]() (用符号表示),重物运动的加速度
(用符号表示),重物运动的加速度![]() (用符号表示)
(用符号表示)
③该小组的同学在坐标纸上建立图丙所示坐标系,标出了各组测量数据的坐标点,并在坐标系中画出![]() 图线。由图线可以判断计数点 的测量误差较大(填写计数点名称),据图线得到重力加速度
图线。由图线可以判断计数点 的测量误差较大(填写计数点名称),据图线得到重力加速度![]()
![]() (保留三位有效数字)
(保留三位有效数字)
④下判断中正确的是
A.在误差允许的范围内,该实验小组达到了实验目的
B.该地的重力加速度比![]() 偏大
偏大
C.她们实验操作过程中是先释放纸带然后再闭合打点计时器开关
D.实验过程中阻力引起的误差属于系统误差

某实验小组在利用单摆测定当地重力加速度的实验中:
(1)用游标卡尺测定摆球的直径,测量结果如下图所示,则该摆球的直径为________cm.
(2)甲同学分别选用四种材料不同、直径相同的实心球做实验,记录的实验测量数据如下,若要比较准确的计算当地的重力加速度值,应选用第 组实验数据。
| 组别 | 摆球材料 | 摆长 | 最大摆角 | 全振动次数 /次 /次 |
| 1 | 铜 | 0.40 | 15° | 20 |
| 2 | 铁 | 1.00 | 5° | 50 |
| 3 | 铝 | 0.40 | 15° | 10 |
| 4 | 木 | 1.00 | 5° | 50 |
 和周期
和周期 的数值,画出如图
的数值,画出如图 图象中的实线OM,并算出图线的斜率为
图象中的实线OM,并算出图线的斜率为 ,则当地的重力加速度
,则当地的重力加速度 ________。
________。
(4)丙同学也进行了与乙同学同样的实验,但实验后他才发现自己测量摆长时忘了加上摆球的半径,则该同学当时做出的
图象应该是A.虚线①,不平行OM B.虚线②,平行OM
C.虚线③,平行OM D.虚线④,不平行OM
(5)下列措施中可以提高实验精度的是________.
A.选细线做为摆线;
B.单摆摆动时保持摆线在同一竖直平面内;
C.拴好摆球后,令其自然下垂时测量摆长;
D.计时起止时刻,选在最大摆角处。 查看习题详情和答案>>
在实验室中,两组同学分别探究合力一定时,物体的加速度与质量之间的关系.

(1)甲组同学使用DIS(位移传感器、数据采集器、计算机)装置进行实验,如图1所示,①是固定在小车上位移传感器的发射器部分,②是接收部分.在该实验中采用控制变量法,保持小车所受拉力不变,用钩码所受的重力作为小车所受拉力,利用图示装置,改变小车的质量,多次重复测量.在某次实验中根据测得的多组数据可画出a-1/M关系图线.
①如果摩擦力不能忽略,则画出的a-1/M图线为图2中的______.(填“甲”或“乙”或“丙”)
②该实验中某同学画出的图线中AB段明显偏离直线,如图3所示,造成此误差的主要原因是______
A.小车与轨道之间存在摩擦
B.导轨保持了水平状态
C.所挂钩码的总质量太大
D.所用小车的质量太大
(2)乙组同学利用如图甲所示的气垫导轨实验装置来进行实验.
①做实验时,将滑块从图甲所示位置由静止释放,由数字计时器(图中未画出)可读出遮光条通过光电门1、2的时间分别为△t1、△t2;用刻度尺测得两个光电门中心之间的距离x,用游标卡尺测得遮光条宽度d.则滑块经过光电门1时的速度表达式v1=______;经过光电门2时的速度表达式v2=______,滑块加速度的表达式a=______.(以上表达式均用已知字母表示).
②为了保持滑块所受的合力不变,可改变滑块质量M和气垫导轨右端高度h,如图4所示.关于“改变滑块质量M和气垫导轨右端的高度h”的正确操作方法是______.
A.M增大时,h增大,以保持二者乘积增大
B.M增大时,h减小,以保持二者乘积不变
C.M减小时,h增大,以保持二者乘积不变
D.M减小时,h减小,以保持二者乘积减小.
查看习题详情和答案>>

(1)甲组同学使用DIS(位移传感器、数据采集器、计算机)装置进行实验,如图1所示,①是固定在小车上位移传感器的发射器部分,②是接收部分.在该实验中采用控制变量法,保持小车所受拉力不变,用钩码所受的重力作为小车所受拉力,利用图示装置,改变小车的质量,多次重复测量.在某次实验中根据测得的多组数据可画出a-1/M关系图线.
①如果摩擦力不能忽略,则画出的a-1/M图线为图2中的______.(填“甲”或“乙”或“丙”)
②该实验中某同学画出的图线中AB段明显偏离直线,如图3所示,造成此误差的主要原因是______
A.小车与轨道之间存在摩擦
B.导轨保持了水平状态
C.所挂钩码的总质量太大
D.所用小车的质量太大
(2)乙组同学利用如图甲所示的气垫导轨实验装置来进行实验.
①做实验时,将滑块从图甲所示位置由静止释放,由数字计时器(图中未画出)可读出遮光条通过光电门1、2的时间分别为△t1、△t2;用刻度尺测得两个光电门中心之间的距离x,用游标卡尺测得遮光条宽度d.则滑块经过光电门1时的速度表达式v1=______;经过光电门2时的速度表达式v2=______,滑块加速度的表达式a=______.(以上表达式均用已知字母表示).
②为了保持滑块所受的合力不变,可改变滑块质量M和气垫导轨右端高度h,如图4所示.关于“改变滑块质量M和气垫导轨右端的高度h”的正确操作方法是______.
A.M增大时,h增大,以保持二者乘积增大
B.M增大时,h减小,以保持二者乘积不变
C.M减小时,h增大,以保持二者乘积不变
D.M减小时,h减小,以保持二者乘积减小.
查看习题详情和答案>>